备注
Go to the end 下载完整的示例代码。或者通过浏览器中的MysterLite或Binder运行此示例
多项和一对二回归的决策边界#
此示例比较了具有三个类别的2D数据集上的多项和一对二次逻辑回归的决策边界。
我们对两种方法的决策边界进行比较,相当于调用该方法 predict .此外,当一类的概率估计为0.5时,我们绘制了与该线对应的超平面。
# Authors: The scikit-learn developers
# SPDX-License-Identifier: BSD-3-Clause
数据集生成#
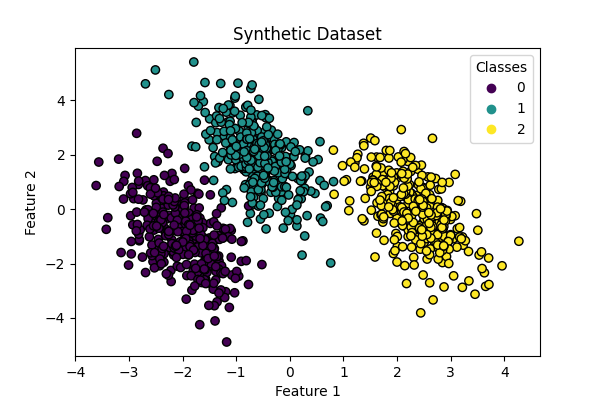
我们使用生成合成数据集 make_blobs 功能该数据集由来自三个不同类别的1,000个样本组成,以以下为中心 [-5, 0] , [0, 1.5] ,而且 [5, -1] .生成后,我们应用线性变换来引入特征之间的一些相关性,并使问题更具挑战性。这会产生具有三个重叠类别的2D数据集,适合展示多项逻辑回归和一对零回归之间的差异。
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_blobs
centers = [[-5, 0], [0, 1.5], [5, -1]]
X, y = make_blobs(n_samples=1_000, centers=centers, random_state=40)
transformation = [[0.4, 0.2], [-0.4, 1.2]]
X = np.dot(X, transformation)
fig, ax = plt.subplots(figsize=(6, 4))
scatter = ax.scatter(X[:, 0], X[:, 1], c=y, edgecolor="black")
ax.set(title="Synthetic Dataset", xlabel="Feature 1", ylabel="Feature 2")
_ = ax.legend(*scatter.legend_elements(), title="Classes")
分类器训练#
我们训练两种不同的逻辑回归分类器:多项分类器和一vs-rest分类器。多项分类器同时处理所有类别,而一对休息方法针对所有其他类别训练每个类别的二进制分类器。
from sklearn.linear_model import LogisticRegression
from sklearn.multiclass import OneVsRestClassifier
logistic_regression_multinomial = LogisticRegression().fit(X, y)
logistic_regression_ovr = OneVsRestClassifier(LogisticRegression()).fit(X, y)
accuracy_multinomial = logistic_regression_multinomial.score(X, y)
accuracy_ovr = logistic_regression_ovr.score(X, y)
决策边界可视化#
让我们可视化该方法提供的两个模型的决策边界 predict 分类器的。
from sklearn.inspection import DecisionBoundaryDisplay
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5), sharex=True, sharey=True)
for model, title, ax in [
(
logistic_regression_multinomial,
f"Multinomial Logistic Regression\n(Accuracy: {accuracy_multinomial:.3f})",
ax1,
),
(
logistic_regression_ovr,
f"One-vs-Rest Logistic Regression\n(Accuracy: {accuracy_ovr:.3f})",
ax2,
),
]:
DecisionBoundaryDisplay.from_estimator(
model,
X,
ax=ax,
response_method="predict",
alpha=0.8,
)
scatter = ax.scatter(X[:, 0], X[:, 1], c=y, edgecolor="k")
legend = ax.legend(*scatter.legend_elements(), title="Classes")
ax.add_artist(legend)
ax.set_title(title)

我们看到决策边界是不同的。这种差异源于他们的做法:
多项逻辑回归在优化期间同时考虑所有类别。
一次与休息的逻辑回归将每个类别独立地与所有其他类别进行匹配。
这些不同的策略可能会导致不同的决策边界,特别是在复杂的多类问题中。
超平面可视化#
当一类的概率估计为0.5时,我们还可视化了与该线对应的超平面。
def plot_hyperplanes(classifier, X, ax):
xmin, xmax = X[:, 0].min(), X[:, 0].max()
ymin, ymax = X[:, 1].min(), X[:, 1].max()
ax.set(xlim=(xmin, xmax), ylim=(ymin, ymax))
if isinstance(classifier, OneVsRestClassifier):
coef = np.concatenate([est.coef_ for est in classifier.estimators_])
intercept = np.concatenate([est.intercept_ for est in classifier.estimators_])
else:
coef = classifier.coef_
intercept = classifier.intercept_
for i in range(coef.shape[0]):
w = coef[i]
a = -w[0] / w[1]
xx = np.linspace(xmin, xmax)
yy = a * xx - (intercept[i]) / w[1]
ax.plot(xx, yy, "--", linewidth=3, label=f"Class {i}")
return ax.get_legend_handles_labels()
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5), sharex=True, sharey=True)
for model, title, ax in [
(
logistic_regression_multinomial,
"Multinomial Logistic Regression Hyperplanes",
ax1,
),
(logistic_regression_ovr, "One-vs-Rest Logistic Regression Hyperplanes", ax2),
]:
hyperplane_handles, hyperplane_labels = plot_hyperplanes(model, X, ax)
scatter = ax.scatter(X[:, 0], X[:, 1], c=y, edgecolor="k")
scatter_handles, scatter_labels = scatter.legend_elements()
all_handles = hyperplane_handles + scatter_handles
all_labels = hyperplane_labels + scatter_labels
ax.legend(all_handles, all_labels, title="Classes")
ax.set_title(title)
plt.show()
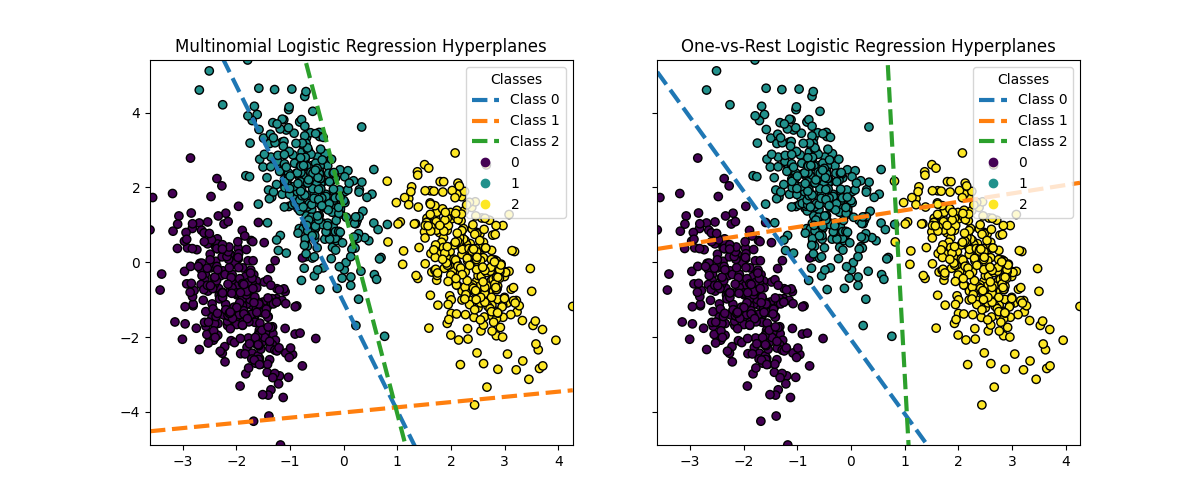
虽然类0和2的超平面在两种方法之间非常相似,但我们观察到类1的超平面明显不同。这种差异源于one-vs-rest和多项式logistic回归的基本方法:
对于一次与休息的逻辑回归:
每个超平面都是通过考虑一个类与所有其他类来独立确定的。
对于类1,超平面代表最好地将类1与组合的类0和2分开的决策边界。
这种二进制方法可以导致更简单的决策边界,但可能无法同时捕获所有类之间的复杂关系。
条件类概率没有可能的解释。
对于多项逻辑回归:
所有超平面都是同时确定的,同时考虑所有类之间的关系。
模型最小化的损失是适当的评分规则,这意味着模型经过优化以估计条件类概率,因此这些概率是有意义的。
每个超平面代表决策边界,其中一个类别的概率变得高于其他类别,基于总体概率分布。
这种方法可以捕捉类之间更微妙的关系,可能会在多类问题中实现更准确的分类。
超平面的差异,特别是对于第1类,突出了这些方法如何产生不同的决策边界,尽管总体精度相似。
在实践中,建议使用多项逻辑回归,因为它可以最大限度地减少公式良好的损失函数,从而获得更好校准的类概率,从而获得更可解释的结果。当谈到决策边界时,应该制定一个效用函数,将类概率转换为对当前问题有意义的量。One vs-rest允许不同的决策边界,但不允许像效用函数那样对类之间的权衡进行细粒度控制。
Total running time of the script: (0分0.488秒)
相关实例
Gallery generated by Sphinx-Gallery <https://sphinx-gallery.github.io> _