>>> from env_helper import info; info()
页面更新时间: 2023-12-29 21:24:04
运行环境:
Linux发行版本: Debian GNU/Linux 12 (bookworm)
操作系统内核: Linux-6.1.0-16-amd64-x86_64-with-glibc2.36
Python版本: 3.11.2
3.1. 高级滤波¶
本文提供更多更强大的滤波方法,这些方法放在 filters.rank 子模块内。
这些方法需要用户自己设定滤波器的形状和大小,因此需要导入 morphology
模块来设定。
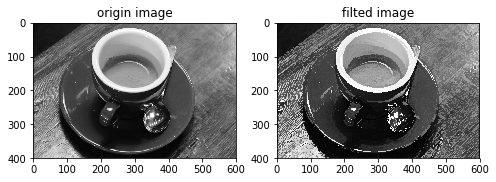
3.1.1. autolevel¶
这个词在 Photoshop 里面翻译成自动色阶,用局部直方图来对图片进行滤波分级。
该滤波器局部地拉伸灰度像素值的直方图,以覆盖整个像素值范围。
格式: skimage.filters.rank.autolevel(image,selem)
selem 表示结构化元素,用于设定滤波器。
>>> %matplotlib inline
>>>
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> auto =sfr.autolevel(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(auto,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56cf15128>

3.1.2. bottomhat 与 tophat¶
bottomhat: 此滤波器先计算图像的形态学闭运算,然后用原图像减去运算的结果值,有点像黑帽操作。tophat: 此滤波器先计算图像的形态学开运算,然后用原图像减去运算的结果值,有点像白帽操作。
格式:
skimage.filters.rank.bottomhat(image, selem)
skimage.filters.rank.tophat(image, selem)
selem表示结构化元素,用于设定滤波器。
下面是 bottomhat 滤波的例子:
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> auto =sfr.bottomhat(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(auto,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56ce468d0>

3.1.3. enhance_contrast¶
对比度增强。求出局部区域的最大值和最小值,然后看当前点像素值最接近最大值还是最小值,然后替换为最大值或最小值。
函数:enhance_contrast(image, selem)
selem 表示结构化元素,用于设定滤波器。
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> auto =sfr.enhance_contrast(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(auto,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56cdefbe0>
3.1.4. entropy¶
求局部熵,熵是使用基为 2
的对数运算出来的。该函数将局部区域的灰度值分布进行二进制编码,返回编码的最小值。
函数格式: entropy(image, selem)
selem 表示结构化元素,用于设定滤波器。
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> dst =sfr.entropy(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(dst,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56cd16ef0>

3.1.5. equalize¶
均衡化滤波。利用局部直方图对图像进行均衡化滤波。
函数格式: equalize(image, selem)
selem 表示结构化元素,用于设定滤波器。
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> dst =sfr.equalize(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(dst,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56cc48240>
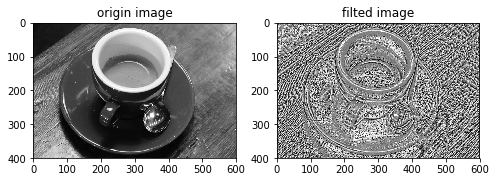
3.1.6. gradient¶
返回图像的局部梯度值(如:最大值-最小值),用此梯度值代替区域内所有像素值。
函数格式: gradient(image, selem)
selem 表示结构化元素,用于设定滤波器。
>>> from skimage import data,color
>>> import matplotlib.pyplot as plt
>>> from skimage.morphology import disk
>>> import skimage.filters.rank as sfr
>>> img =color.rgb2gray(data.coffee())
>>> dst =sfr.gradient(img, disk(5)) #半径为5的圆形滤波器
>>>
>>> plt.figure('filters',figsize=(8,8))
>>> plt.subplot(121)
>>> plt.title('origin image')
>>> plt.imshow(img,plt.cm.gray)
>>>
>>> plt.subplot(122)
>>> plt.title('filted image')
>>> plt.imshow(dst,plt.cm.gray)
/usr/lib/python3/dist-packages/skimage/util/dtype.py:141: UserWarning: Possible precision loss when converting from float64 to uint8
.format(dtypeobj_in, dtypeobj_out))
<matplotlib.image.AxesImage at 0x7ff56cbf2550>

3.1.7. 其它滤波器¶
滤波方式很多,下面不再一一详细讲解,仅给出核心代码,所有的函数调用方式都是一样的。
最大值滤波器(maximum):返回图像局部区域的最大值,用此最大值代替该区域内所有像素值。
dst =sfr.maximum(img, disk(5))
最小值滤波器(minimum) :返回图像局部区域内的最小值,用此最小值取代该区域内所有像素值。
dst =sfr.minimum(img, disk(5))
均值滤波器(mean): 返回图像局部区域内的均值,用此均值取代该区域内所有像素值。
dst =sfr.mean(img, disk(5))
中值滤波器(median): 返回图像局部区域内的中值,用此中值取代该区域内所有像素值。
dst =sfr.median(img, disk(5))
莫代尔滤波器(modal) : 返回图像局部区域内的modal值,用此值取代该区域内所有像素值。
dst =sfr.modal(img, disk(5))
otsu阈值滤波(otsu): 返回图像局部区域内的otsu阈值,用此值取代该区域内所有像素值。
dst =sfr.otsu(img, disk(5))
阈值滤波(threshhold): 将图像局部区域中的每个像素值与均值比较,大于则赋值为1,小于赋值为0,得到一个二值图像。
dst =sfr.threshold(img, disk(5))
减均值滤波(subtract_mean): 将局部区域中的每一个像素,减去该区域中的均值。
dst =sfr.subtract_mean(img, disk(5))
求和滤波(sum):求局部区域的像素总和,用此值取代该区域内所有像素值。
dst =sfr.sum(img, disk(5))