12.4. 在立体声2中观看¶
我们可以通过各种摄影测量技术来测量地面特征(例如,高大的树木和建筑物)的高度和地形。例如,确定高度, h 在一张航空照片的边缘附近的一幢高大建筑物。如果这张照片是垂直拍摄的,即直视,那么它的中心位于最低点(相机垂直于正下方表面点的垂直线 [假定为平坦] )在这种情况下,最低点与照片中的主点(P.P.)重合,即透镜光轴(如同延伸的)与地面的交点,因此P.P.也是照片的真实中心。如果照片(和光轴)不垂直,该点就会偏离中心。如果这座建筑靠近P.P.,那么它的顶部和底部在照片中似乎是一致的。如果它在某个径向距离r处远离该点,则它在倾斜状态下的观察状态会使顶部比底部更远离p.p.,在照片中可测量到的量为, d . 对于飞机高度, H ,(如果我们知道地面距离,可以从比例尺计算),h的值是, h = (d/r) x (H) . 我们可以用加利福尼亚州长滩市中心的大型、低摄像机高度的航空照片来说明这种方法(来自Sabins,1987;由J.van Eden提供),其中高层建筑的横向倾斜在外部很明显。在这里,我们在P.P.和靠近边缘的一栋建筑之间绘制了D和R:
11-11: Using this figure, determine the height h of the building to which are drawn white arrows to distances d (photo displacement from bottom to top) and r (to building top). On the actual photo (not your screen) d = 0.5 inch and r = 3.0 inches. Scale of the photo is 1:3600. Aircraft altitude is 1800 ft. `ANSWER <answers.html#11-11>`__
利用这个公式,我们可以从立体对中计算出沿曲面不同高程点之间的高度差(浮雕)。 h = (H) dP/(P + dP) . 交叉检查上图和下图,以帮助可视化流程。我们在这幅图中展示了两张斜视的照片,这是典型的空中偏航(绕垂直轴旋转)效果。
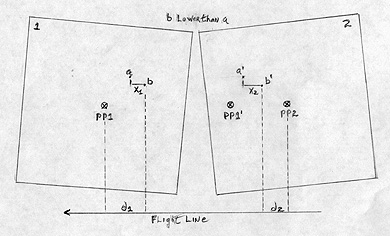
视差(定义见第11-3页)实际上是一种物理条件,它指的是由于观察位置的改变而导致照片或图像中某一点或某一高度特征的位移。这将发生在连续拍摄的航空或太空照片中(例如,立体声对既有重叠(同一飞行线)也有侧边重叠(平行飞行线)。 P 绝对立体视差。对于我们要确定高度或起伏度的斜坡上的任何站立物体或分离点,我们在底部(此处,点)之间的一张照片上测量距离(平行于飞行线的方向)。 b )这一特点和主要点(pp1)或最低点。然后我们对这个共轭特征做同样的处理,因为它出现在另一张照片的不同位置。请注意,第一张照片p.p.(pp1),现在位于距离第二张照片p.p.(pp2)中心(pp1')的某个距离处。然后我们平均两个距离(d1+d2除以2)。
这个 dP 术语是微分视差。我们通过测量地物底部和顶部之间的距离或斜坡上不同高度的两个临近地形点之间的距离找到了这一点,我们在这两张照片中的每一张中都找到了这一点,而这两张照片中的一对处于最佳的立体视觉对准状态。那么,dp是两个距离值之间的数值差(x:sub:2-x1 ,这在每个照片对中都是不同的。我们可以通过使用特殊的设备,如立体仪、视差楔形物或视差棒,从光学上找到dp的值。每种方法都使用“浮点”方法的变体,在这种方法中,当我们在镜子立体镜下查看对齐的照片时,可以看到参考标记(点或交叉点)。我们把视差条放在照片平面上,这样一张照片上的固定标记与可移动标记(立体视图中可见融合)相吻合,方法是转动螺丝刀,将该标记转换为巧合。然后我们从刻度尺上读取dp的值。当我们对许多点进行此操作时,我们可以计算地图部分的高度和地形值。如果我们参考基准点,这些值就变成绝对值(高程)。
11-12: A stereo pair was obtained from a photo mission flown at 2000 meters. We wish to determine the height of a water tower (storage tank on legs).The photo base length P between the two photos when properly placed for effective stereo viewing is 70 mm. The differential parallax dP for the tower, as measured by a stereometer, is 0.4 mm. What is the height? `ANSWER <answers.html#11-12>`__
使用上述设备在立体照片中指定足够多的高程点以进行轮廓绘制是困难和乏味的。相反,我们使用精密的光学机械立体绘图仪。这些设备使用两个或三个可移动的放映机,将光线通过由玻璃制成的立体声对,这些立体对放置在跟踪台(平板)上,我们可以升高或降低跟踪台。我们制作了一个三维图像或立体模型,外部观察者可以通过某种滤波方法来观察。对于黑白照片,我们使用anaglyph方法进行处理,其中一张照片通过红色滤镜投影,另一张通过青色滤镜投影,然后用相应的滤色镜查看。我们在立体模型上投射一小点光或点。当圆点看起来与模型表面的某些部分(通过观察者看到)重合时,该圆点定位由压盘高度确定并由控制点校准的特定高程。一个有经验的操作者可以沿着模型表面移动光,这样它总是保持一致。这个动作跟踪一条轮廓线。然后他们升高(或降低)平台表一个固定的数额由选定的轮廓间隔确定,他们轮廓下一个高度。这个过程一直持续到它们追踪整个表面。如今,分析立体绘图仪能够通过计算机处理数学转换的数据半自动化轮廓绘制。
数字高程模型(DEM);其他查看模式
您可以访问由EROS数据中心(EDC)维护的站点上生成DEM的概念和机制的概述。 http://edcwww.cr.usgs.gov/glis/hyper/guide/usgs_dem