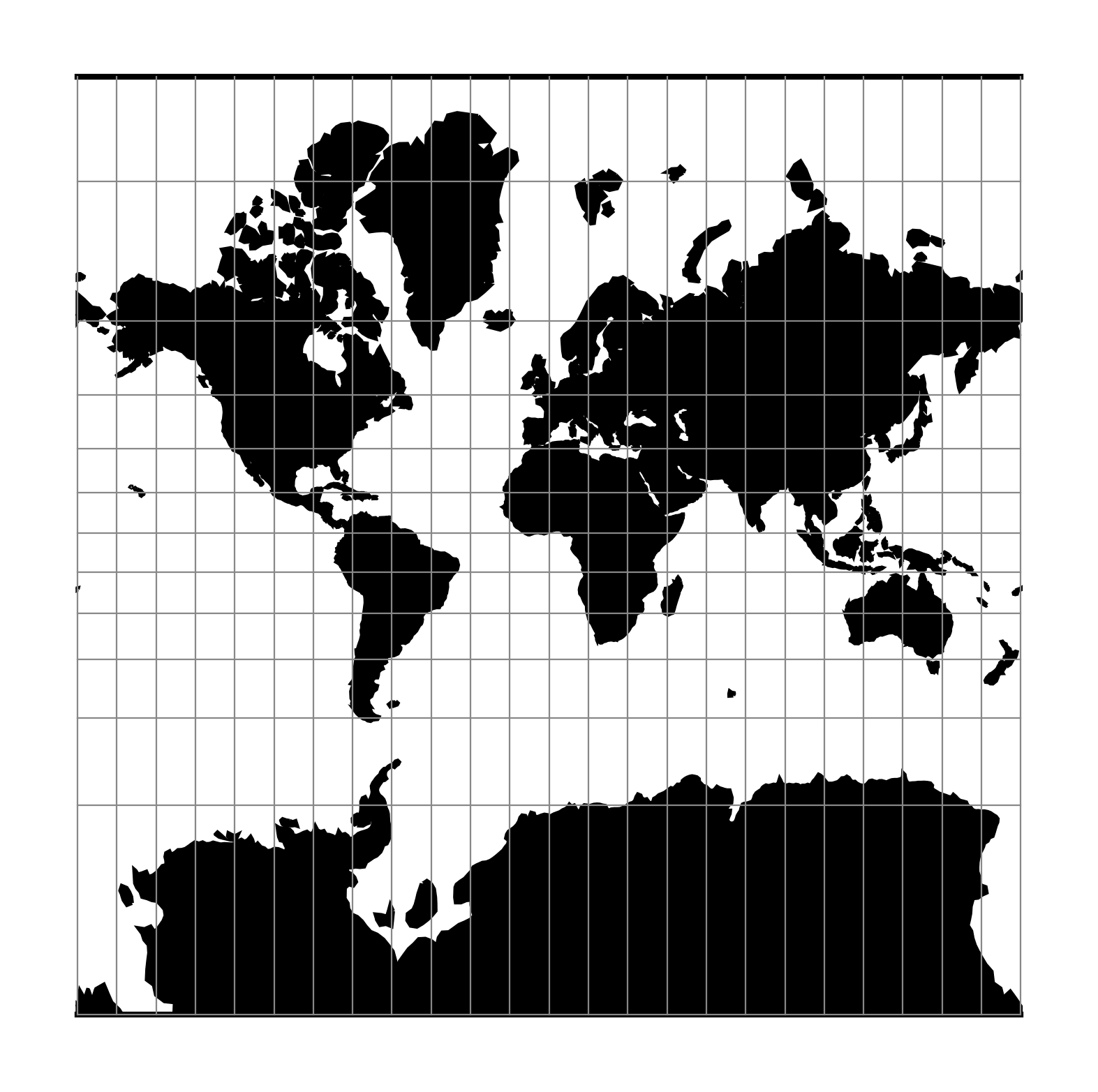
墨卡托¶
墨卡托投影是起源于16世纪的圆柱形地图投影。它被广泛认为是第一个经常使用的地图投影。它是一种共形投影,其中赤道以恒定的比例投影到一条直线上。投影的性质是一条等角线,一条恒定航向的路线,投影到一条直线上。这使得它适合于航海目的。
Classification |
共形圆柱 |
可用表格 |
正向和反向,球形和椭圆形 |
限定区域 |
全球,但最好在赤道附近使用 |
Alias |
默克 |
Domain |
二维 |
输入类型 |
大地坐标 |
输出类型 |
投影坐标 |
项目字符串: +proj=merc¶
使用¶
应用应限于赤道地区,但通常用于具有真实比例尺纬度的航海图 (+lat_ts )在图表边界内或附近指定。它被认为不适合用于世界地图,因为面积严重扭曲;例如,格陵兰岛的投影面积大于南美洲,尽管格陵兰岛的面积很小 \(\frac18\) 南美洲的 [Snyder1987] .
使用真实比例纬度的示例:
$ echo 56.35 12.32 | proj +proj=merc +lat_ts=56.5
3470306.37 759599.90
使用比例因子的示例:
echo 56.35 12.32 | proj +proj=merc +k_0=2
12545706.61 2746073.80
参数¶
备注
投影的所有参数都是可选的。
- +lat_ts=<value>¶
真实尺度的纬度。定义缩放不扭曲的纬度。优先于
+k_0如果两个选项一起使用。默认为0.0。
- +k_0=<value>¶
比例因子。确定投影中使用的比例因子。
默认为1.0。
- +lon_0=<value>¶
投影中心的经度。
默认为0.0。
- +x_0=<value>¶
假东距。
默认为0.0。
- +y_0=<value>¶
假北距。
默认为0.0。
数学定义¶
球形¶
对于投影的球形形式,我们引入比例因子:
正向投影¶
数量 \(\psi\) 是等轴测纬度。
反投影¶
椭球形¶
对于投影的椭球形式,我们引入比例因子:
在哪里?
\(a\,m(\phi)\) 圆的半径是纬度 \(\phi\) .
正向投影¶
反投影¶
纬度 \(\phi\) 通过将 \(\psi\) . 这遵循下面给出的方法 [Karney2011tm] . 首先介绍共形纬度
纬度的切线 \(\tau = \tan\phi\) 和 \(\tau' = \tan\chi = \sinh\psi\) 与…有关
在哪里?
这是通过取 \(\sinh\) 方程的 \(\psi\) 使用多参数公式。方程 \(\tau'\) 可以解决给 \(\tau\) 用牛顿法 \(\tau = \tau'/(1 - e^2)\) 作为一个初步的猜测和所需的衍生工具,由
这在不超过2次迭代之后收敛。最终设定 \(\phi=\tan^{{-1}}\tau\) .