3.2. 图像阈值化¶
3.2.1. 目标¶
在本教程中,您将学习简单阈值、自适应阈值、Otsu阈值等。
您将学习以下功能: cv2.threshold , cv2.adaptiveThreshold 等。
3.2.2. 简单阈值¶
在这里,问题是直截了当的。如果像素值大于阈值,则为其指定一个值(可能为白色),否则为其指定另一个值(可能为黑色)。使用的函数是 cv2.threshold . 第一个参数是源图像,它 应该是灰度图像 . 第二个参数是用于分类像素值的阈值。第三个参数是maxVal,它表示像素值大于(有时小于)阈值时要给定的值。OpenCV提供了不同的阈值设置方式,由函数的第四个参数决定。不同的类型有:
cv2.THRESH_BINARY
cv2.THRESH_BINARY_INV
cv2.THRESH_TRUNC
cv2.THRESH_TOZERO
cv2.THRESH_TOZERO_INV
文档清楚地解释了每种类型的用途。请看一下文件。
得到两个输出。第一个是 收回 稍后会解释。第二个输出是 阈值图像 .
代码:
>>> import cv2
>>> import numpy as np
>>> from matplotlib import pyplot as plt
>>>
>>> img = cv2.imread('/cvdata/gradient.png',0)
>>> ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
>>> ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
>>> ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
>>> ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
>>> ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
>>>
>>> titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
>>> images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
>>>
>>> for i in range(6):
>>> plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
>>> plt.title(titles[i])
>>> plt.xticks([]),plt.yticks([])
>>>
>>> plt.show()
<Figure size 640x480 with 6 Axes>
注意
为了绘制多个图像,我们使用 \(plt.subplot()\) 功能。有关详细信息,请签出Matplotlib文档。
结果如下:
3.2.3. 自适应阈值¶
在上一节中,我们使用全局值作为阈值。但在不同地区的照明条件不同的情况下,可能不一定都是好的。在这种情况下,我们采用自适应阈值。在这个算法中,计算图像的一个小区域的阈值。因此,对于同一幅图像的不同区域,我们得到了不同的阈值,对于不同光照的图像,我们得到了更好的结果。
它有三个“特殊”输入参数和一个输出参数。
块大小 -它决定了邻里面积的大小。
C -它只是一个从计算出的平均值或加权平均值中减去的常数。
下面的代码比较了具有不同照明的图像的全局阈值和自适应阈值:
>>> %matplotlib inline
>>>
>>> import cv2
>>> import numpy as np
>>> from matplotlib import pyplot as plt
>>>
>>> img = cv2.imread('/cvdata/dave.jpg',0)
>>> # img = cv2.imread('/cvdata/apple.jpg', 0)
>>> img = cv2.medianBlur(img,5)
>>>
>>> ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
>>> th2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
>>> cv2.THRESH_BINARY,11,2)
>>> th3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
>>> cv2.THRESH_BINARY,11,2)
>>>
>>> titles = ['Original Image', 'Global Thresholding (v = 127)',
>>> 'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
>>> images = [img, th1, th2, th3]
>>>
>>> for i in range(4):
>>> plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
>>> plt.title(titles[i])
>>> plt.xticks([]),plt.yticks([])
>>> plt.show()
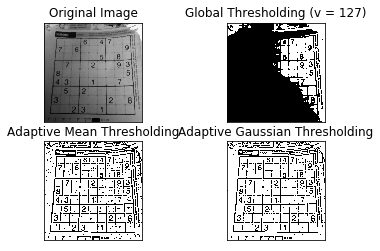
结果:
3.2.4. 大津二值化¶
在第一部分中,我告诉过你还有第二个参数 收回 . 它的用途是当我们去大津的二值化。那是什么?
在全局阈值化中,我们使用任意值作为阈值,对吗?那么,我们怎么知道我们选择的价值观是好是坏呢?答案是,试错法。但是考虑一下 双峰图像 ( 简单地说,双峰图像是直方图有两个峰值的图像 ). 对于那个图像,我们可以近似取峰值中间的一个值作为阈值,对吧?这就是大津二值化所做的。简单地说,它根据双峰图像的直方图自动计算阈值。(对于非双峰图像,二值化将不准确。)
为此,我们使用了cv2.threshold()函数,但是传递了一个额外的标志, \(cv2.THRESH_OTSU\) . 对于阈值,只需传递零 . 然后算法找到最佳阈值并返回你作为第二个输出, retVal . 如果不使用Otsu阈值,retVal与您使用的阈值相同。
看看下面的例子。输入图像是噪声图像。在第一种情况下,我对127的值应用了全局阈值。在第二个例子中,我直接应用了Otsu的阈值。在第三种情况下,我用5x5高斯核对图像进行滤波以去除噪声,然后应用Otsu阈值。查看噪声过滤如何改进结果。
>>> import cv2
>>> import numpy as np
>>> from matplotlib import pyplot as plt
>>>
>>> img = cv2.imread('/cvdata/noisy2.png',0)
>>>
>>> # img = cv2.imread('/cvdata/apple.jpg',0)
>>>
>>> # global thresholding
>>> ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
>>>
>>> # Otsu's thresholding
>>> ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
>>>
>>> # Otsu's thresholding after Gaussian filtering
>>> blur = cv2.GaussianBlur(img,(5,5),0)
>>> ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
>>>
>>> # plot all the images and their histograms
>>> images = [img, 0, th1,
>>> img, 0, th2,
>>> blur, 0, th3]
>>> titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
>>> 'Original Noisy Image','Histogram',"Otsu's Thresholding",
>>> 'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
>>>
>>> for i in range(3):
>>> plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
>>> plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
>>> plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
>>> plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
>>> plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
>>> plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
>>> plt.show()
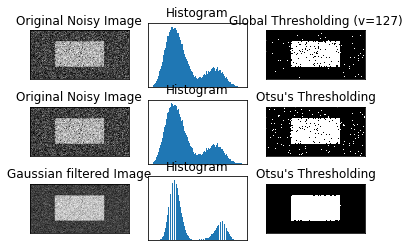
结果:
大津的二值化是如何工作的?¶
本节演示了Otsu二值化的Python实现,以展示它的实际工作方式。如果你不感兴趣,你可以跳过这个。
由于我们使用的是双模图像,Otsu的算法试图找到一个阈值(t),该阈值将 weighted within-class variance 由关系给出:
在哪里?
它实际上找到了一个位于两个峰值之间的t值,使得两个类的方差最小。它可以简单地用Python实现,如下所示:
>>> img = cv2.imread('/cvdata/noisy2.png',0)
>>> blur = cv2.GaussianBlur(img,(5,5),0)
>>>
>>> # find normalized_histogram, and its cumulative distribution function
>>> hist = cv2.calcHist([blur],[0],None,[256],[0,256])
>>> hist_norm = hist.ravel()/hist.max()
>>> Q = hist_norm.cumsum()
>>>
>>> bins = np.arange(256)
>>>
>>> fn_min = np.inf
>>> thresh = -1
>>>
>>> for i in range(1,256):
>>> p1,p2 = np.hsplit(hist_norm,[i]) # probabilities
>>> q1,q2 = Q[i],Q[255]-Q[i] # cum sum of classes
>>> b1,b2 = np.hsplit(bins,[i]) # weights
>>>
>>> # finding means and variances
>>> m1,m2 = np.sum(p1*b1)/q1, np.sum(p2*b2)/q2
>>> v1,v2 = np.sum(((b1-m1)**2)*p1)/q1,np.sum(((b2-m2)**2)*p2)/q2
>>>
>>> # calculates the minimization function
>>> fn = v1*q1 + v2*q2
>>> if fn < fn_min:
>>> fn_min = fn
>>> thresh = i
>>>
>>> # find otsu's threshold value with OpenCV function
>>> ret, otsu = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
>>> print (thresh,ret)
118 117.0
/usr/lib/python3/dist-packages/ipykernel_launcher.py:20: RuntimeWarning: invalid value encountered in double_scalars
/usr/lib/python3/dist-packages/ipykernel_launcher.py:20: RuntimeWarning: divide by zero encountered in double_scalars
/usr/lib/python3/dist-packages/ipykernel_launcher.py:21: RuntimeWarning: invalid value encountered in multiply
(有些功能可能是新的,但我们将在接下来的章节中介绍)
3.2.5. 额外资源¶
数字图像处理
3.2.6. 练习¶
有一些优化可用于大津的二值化。你可以搜索并实现它。