摘要: 1.时空立方体模型(Space-time cube) 位置、属性、时间作为矩阵行、列、高 2 .序列快照模型(Sequent snapshots) 序 列快照模型,也称时间片快照模型(Time-slice snapshots)序列快照模型的基本思想是将某一...
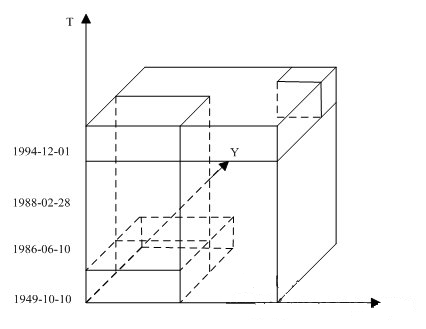
1.时空立方体模型(Space-time cube)
位置、属性、时间作为矩阵行、列、高
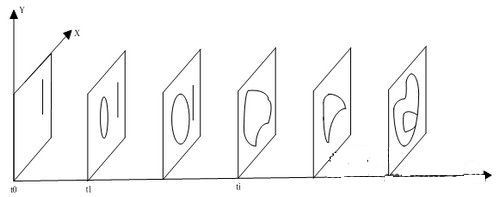
2 .序列快照模型(Sequent snapshots)
序 列快照模型,也称时间片快照模型(Time-slice snapshots)序列快照模型的基本思想是将某一时间段内地理现象的变化过程,用一系列时间片段的序列快照保存起来,反映整个空间特征的状态,根据需 要对指定时间片段的现实片段进行播放,快照间的时间间隔不一定相同。
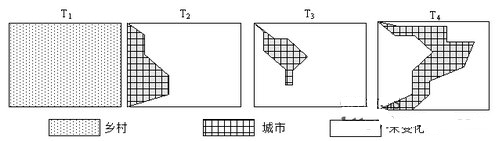
3 .基态修正模型(Base state with amendments)
基 态修正模型也称之为底图叠加模型(Base map with overlap),它是按事先设定的时间间隔采样,不存储研究区域中每个状态的全部信息,只存贮某个时间的数据状态(称为基态),以及相对于基态的变化 量,避免连续快照模型将每张未发生变化部分的快照特征重复进行记录。
4 .时空复合模型(Space-time composite)
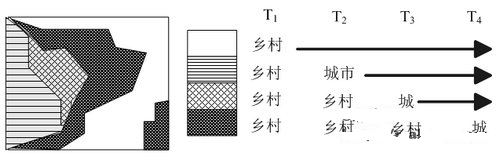
时空复合模型将空间分隔成具有相同时空过程的最大的公共时空单元,称为时空单元,在存储上,每个时空单元被看成是静态的空间单元,并将该时空单元中的时空过程作为属性关系表来存储。
