scipy.spatial.transform.RotationSpline¶
- class scipy.spatial.transform.RotationSpline(times, rotations)[源代码]¶
使用连续的角速率和加速度插值旋转。
每个连续方向之间的旋转矢量是时间的三次函数,并且保证角速度和加速度是连续的。这种插值类似于三次样条插值。
请参阅 [1] 了解数学和实现细节。
- 参数
- times类似阵列,形状(N,)
已知旋转的次数。必须至少指定2次。
- 旋转 :
Rotation实例循环实例 旋转以执行其间的插值。必须包含N个旋转。
参考文献
示例
>>> from scipy.spatial.transform import Rotation, RotationSpline
从欧拉角度定义时间和旋转的顺序:
>>> times = [0, 10, 20, 40] >>> angles = [[-10, 20, 30], [0, 15, 40], [-30, 45, 30], [20, 45, 90]] >>> rotations = Rotation.from_euler('XYZ', angles, degrees=True)
创建插值器对象:
>>> spline = RotationSpline(times, rotations)
插值Euler角度、角速率和加速度:
>>> angular_rate = np.rad2deg(spline(times, 1)) >>> angular_acceleration = np.rad2deg(spline(times, 2)) >>> times_plot = np.linspace(times[0], times[-1], 100) >>> angles_plot = spline(times_plot).as_euler('XYZ', degrees=True) >>> angular_rate_plot = np.rad2deg(spline(times_plot, 1)) >>> angular_acceleration_plot = np.rad2deg(spline(times_plot, 2))
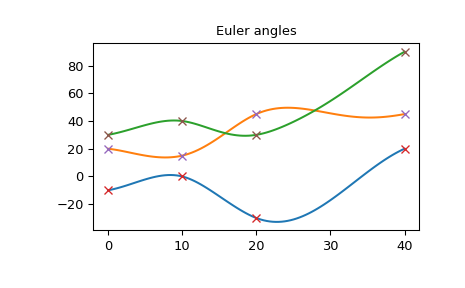
在此图中,您可以看到欧拉角是连续且平滑的:
>>> import matplotlib.pyplot as plt >>> plt.plot(times_plot, angles_plot) >>> plt.plot(times, angles, 'x') >>> plt.title("Euler angles") >>> plt.show()
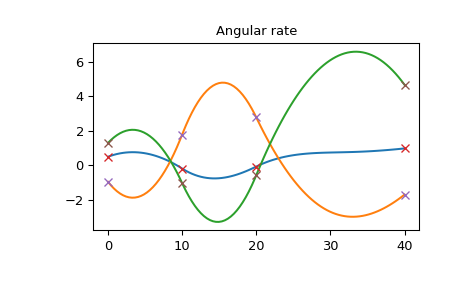
角速率也很平滑:
>>> plt.plot(times_plot, angular_rate_plot) >>> plt.plot(times, angular_rate, 'x') >>> plt.title("Angular rate") >>> plt.show()
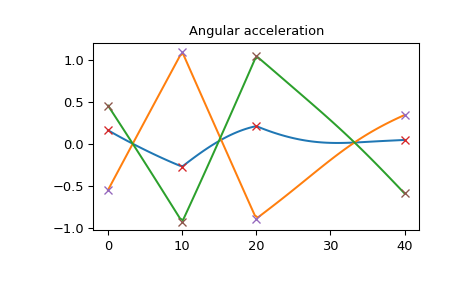
角加速度是连续的,但不是平滑的。还要注意,角加速度不是分段线性函数,因为它不同于旋转向量的二阶导数(与三次样条一样是分段线性函数)。
>>> plt.plot(times_plot, angular_acceleration_plot) >>> plt.plot(times, angular_acceleration, 'x') >>> plt.title("Angular acceleration") >>> plt.show()
方法:
__call__\(次数[, order] )计算插值值。