城市夜光遥感应用:进展、挑战和前景
访问量: 1387 次浏览
据调查,持续进行的全球城市化预计到 2050 年将带来 26 亿新城市居民,
而容纳这些新居民所需的约 60% 的城市土地面积尚未建成。
一项关于未来城市增长的全球研究估计,
2015 年至 2050 年间,
城市面积将增加 0.6-130 万平方公里,
比 2015 年城市足迹增长 78%-171%。
鉴于城市和人类住区可持续发展的迫切需要,
监测城市范围以及城市基础设施、城内地区和社会经济部门的变化至关重要。
人类世见证了人类聚居区夜景发生了前所未有的变化,
从漆黑到灯火通明。
在过去的三十年中,
夜光遥感(Nighttime light[英文缩写为 NTL])图像已成为以空间明确的方式描绘这种不断变化的夜景的全球图标。
NTL 图像中呈现的明暗对比引人注目,
使其成为人类活动的理想代表。
NTL 数据的这种独特性质使其在满足了解城市化的需求方面区别于“白天”遥感数据。
NTL 数据不能仅代表正如大多数“白天”遥感数据一样,
城市化的空间范围(例如城市范围),
NTL 强度也是人类活动的直接指标。
NTL 强度可以揭示城市化强度的城市内部变化,
并与社会经济变量表现出很强的相关性,
因此适合对这些变量进行建模和空间化。
NTL 的这些能力是理解城市化的关键,
而城市化通过“白天”遥感数据几乎无法实现。
自1992 年以来,NOAA 国家地球物理数据中心首次对 NTL 遥感
数据 DMSP-OLS 进行数字已存档 30 多年。三十多年的
横断面研究记录证明了 NTL 图像在理解城市
化方面的强大能力,例如绘制城市化进程图、
社会经济建模和空间化(例如国内生产总值和电力消耗)
和环境变量(如CO2排放),呈现灾害、武装冲
突和节假日期间人类活动的变化,以及监测光污
染及其对生态系统和人类健康的影响。NTL 传感器、
数据产品和方法的最新进展为满足城市观测中的
需求带来了新的潜力,但同时也带来了以前的评论
中未讨论或预见到的新挑战。在此背景下,本文对
基于 NTL 的城市应用的趋势、进展和挑战进行了
系统回顾,并提出希望激发未来研究的方向。
NTL数据的城市应用趋势
数据产品
自20世纪90年代以来,
各种 NTL 数据产品被公开发布,
包括 DMSP-OLS 和 VIIRS 的 NTL 数据产品,
以及机载 NTL 图像、多光谱和高分辨率 NTL 观测以及国际空间站(ISS)拍摄的 NTL 图像。
随着这些新观测平台和产品的出现,
以及由于其性能改进而带来的进步,
NTL 数据的城市应用一直在不断发展。
下面回顾了 NTL 数据产品如何用于城市应用的趋势。
1.平台:DMSP-OLS
(1)产品:版本 4
- 空间分辨率:30 arcsec
- 空间覆盖:180°W to 180°E, 65°S to 75°N
- 时间分辨率:年
- 时间覆盖范围:1992–2013
- 光谱范围:0.5–0.9 μm
- 动态范围:6 位
- 弱光检测限(W/cm 2 /sr):5.0E-10
- 可访问性:Free
(2)产品:辐射校准产品
- 空间分辨率:30 arcsec
- 空间覆盖:180°W to 180°E, 65°S to 75°N
- 时间分辨率:年
- 时间覆盖范围:1996,1999,2000,2002,2004,2006,2010,2011
- 光谱范围:0.5–0.9 μm
- 动态范围:≫ 6 位
- 弱光检测限(W/cm 2 /sr):5.0E-10
- 可访问性:Free
(3)产品:月度产品
- 空间分辨率:30 arcsec
- 空间覆盖:180°W to 180°E, 65°S to 75°N
- 时间分辨率:月
- 时间覆盖范围:1992–2013
- 光谱范围:0.5–0.9 μm
- 动态范围:6 位
- 弱光检测限(W/cm 2 /sr):5.0E-10
- 可访问性:Free
(4)产品:DMSP NTL Extension
- 空间分辨率:30 arcsec
- 空间覆盖:180°W to 180°E, 65°S to 75°N
- 时间分辨率:月
- 时间覆盖范围:2013-
- 光谱范围:0.5–0.9 μm
- 动态范围:6 位
- 弱光检测限(W/cm 2 /sr):5.0E-10
- 可访问性:Free
2.平台:Suomi-NPP VIIRS
(1)产品:版本 1
- 空间分辨率:15 arcsec
- 空间覆盖:全球
- 时间分辨率:月
- 时间覆盖范围:2012-
- 光谱范围:0.5–0.9 μm
- 动态范围:14 位
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:Free
(2)产品:版本 2
- 空间分辨率:15 arcsec
- 空间覆盖:全球
- 时间分辨率:日/年
- 时间覆盖范围:2012-
- 光谱范围:0.5–0.9 μm
- 动态范围:14 位
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:Free
(3)产品:Black Marble
- 空间分辨率:15 arcsec
- 空间覆盖:全球
- 时间分辨率:日/月/年
- 时间覆盖范围:2012-
- 光谱范围:0.5–0.9 μm
- 动态范围:14 位
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:Free
(4)产品:Black Marble HD
- 空间分辨率:<30 m
- 空间覆盖:本地到区域
- 时间分辨率:日/月/年
- 时间覆盖范围:2012-
- 光谱范围:0.5–0.9 μm
- 动态范围:-
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:按需
(5)产品:Black Marble NRT
- 空间分辨率:15 arcsec
- 空间覆盖:全球
- 时间分辨率:日
- 时间覆盖范围:2012-
- 光谱范围:0.5–0.9 μm
- 动态范围:14 位
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:Free
3.平台:NOAA-20 VIIRS
- 产品:VIIRS
- 空间分辨率:15 arcsec
- 空间覆盖:全球
- 时间分辨率:日
- 时间覆盖范围:2018-
- 光谱范围:0.5–0.9 μm
- 动态范围:14 位
- 弱光检测限(W/cm 2 /sr):2.0E-11
- 可访问性:Free
4.平台:Luojia-1
- 产品:Luojia-1
- 空间分辨率:129 m
- 空间覆盖:区域
- 时间分辨率:16日
- 时间覆盖范围:2018–2019
- 光谱范围:0.46–0.98 μm
- 动态范围:12位
- 弱光检测限(W/cm 2 /sr):9.0E-09
- 可访问性:Free
5.平台:Jilin01
- 产品:Jilin01-3B/4/5/6/7/8
- 空间分辨率:0.92 m
- 空间覆盖:本地到区域
- 时间分辨率:16日
- 时间覆盖范围:2017-
- 光谱范围:0.43–0.72 μm (RBG)
- 动态范围:8位
- 弱光检测限(W/cm 2 /sr):7.0E-07
- 可访问性:按需
6.平台:SDGSAT-1
- 产品:SDGSAT-1
- 空间分辨率:10 m: Pan;40 m: RGB
- 空间覆盖:全球
- 时间分辨率:11日
- 时间覆盖范围:2022
- 光谱范围:0.44–0.91 μm(Pan);0.42–0.89 μm(RGB)
- 动态范围:≥12位
- 弱光检测限(W/cm 2 /sr):1.6E-07
- 可访问性:Free
7.平台:Lookup-1
- 产品:Lookup-1
- 空间分辨率:60 m
- 空间覆盖:本地到区域
- 时间分辨率:按需
- 时间覆盖范围:2021-
- 光谱范围: 0.42–0.7 μm
- 动态范围:∼9位
- 弱光检测限(W/cm 2 /sr):7.0E-10
- 可访问性:按需
8.平台:EROS-B
- 产品:EROS-B
- 空间分辨率:0.65 m
- 空间覆盖:本地到区域
- 时间分辨率:按需
- 时间覆盖范围:2013–2022
- 光谱范围:0.45–0.9 μm
- 动态范围:10位
- 弱光检测限(W/cm 2 /sr):-
- 可访问性:按需
9.平台:ISS
- 产品:ISS
- 空间分辨率:5–200 m
- 空间覆盖:区域
- 时间分辨率:不定期
- 时间覆盖范围:2003-
- 光谱范围:RGB
- 动态范围:-
- 弱光检测限(W/cm 2 /sr):-
- 可访问性:Free
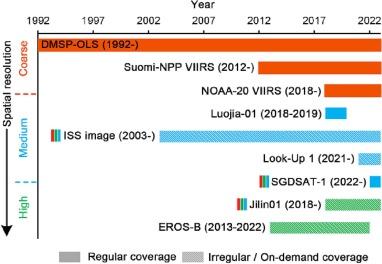
星载 NTL 平台示意图及其主要特征,
包括空间分辨率、时间覆盖范围和覆盖模式。
提供多光谱 NTL 图像的平台也被标记。
最早的遥感 NTL 观测可以追溯到20世纪70年代的 DMSP-OLS 卫星。
然而,直到 1992 年,
卫星被完全数字化、处理并可供 NOAA 地球观测组 (EOG) 公开使用时,
DMSP-OLS 才开始在城市中广泛应用。
虽然其他一些 NTL 数据集,
例如 ISS 图像和 SAC-C/D 图像,
已用于局部规模的研究,
但它们的使用在很大程度上受到限制。
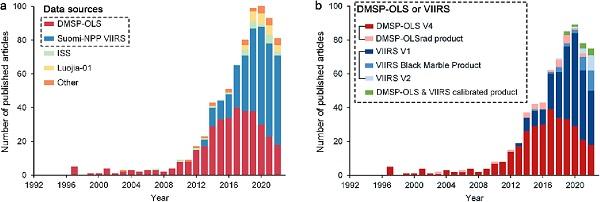
(a) 使用不同数据源发表的文章数量。
(b) DMSP-OLS 和 VIIRS 不同数据产品之间的更仔细比较。
然而,DMSP-OLS 最初是为气象监测而不是城市应用而设计的,
其应用潜力受到过时的传感器技术的限制,
特别是其数据存储容量和校准系统。
Suomi-NPP 卫星的 VIIRS 传感器的日/夜波段(DNB)于2011年发射,
代表了 NTL 遥感的革命性里程碑。
VIIRS 是第一个专门为全球范围的 NTL 观测而设计的卫星传感器,
其传感器特性远远高于DMSP-OLS,
包括更高的空间分辨率、动态范围、低光探测灵敏度和星载校准系统。
因此,VIIRS 的年使用率在2022年急剧增加至65%,
而基于 DMSP-OLS 的研究比例在2012年至2022年间从87%下降至22%。
许多以前依赖 DMSP-OLS 的研究现在已经“移植”到 VIIRS 数据上。
迄今为止,DMSP-OLS(1992-2013,V4产品)和VIIRS(2012至今)的结合仍然是长期 NTL 观测的唯一解决方案。
最近城市 NTL 遥感研究的激增
尽管 NTL 遥感在 20 世纪 90 年代以数字方式存档和发布,
但在 2010 年代之后才开始流行。
由于 NTL 平台和产品的快速发展,
预计城市 NTL 研究将持续增长。
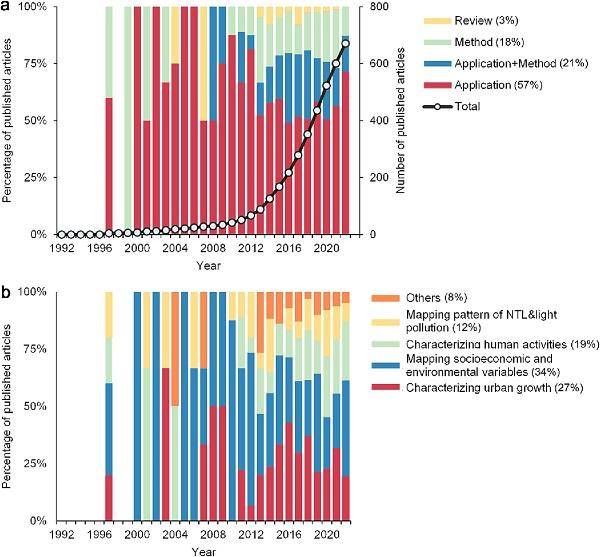
文章类型与发表文章总数的百分比构成(a)。
基于 NTL 的城市应用的每个主题的百分比构成 (b)。
括号内的数值表示整个期间的百分比构成。
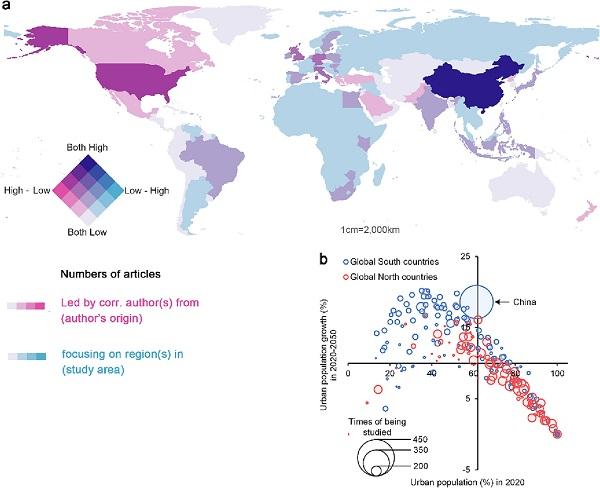
城市 NTL 遥感研究的空间格局
城市 NTL 研究的空间格局表明,
中国和美国在城市 NTL 遥感领域的研究占据主导地位,
其次是英国、德国和意大利。
超过四分之三的研究要么集中在中国或美国的地区,
要么考察整个全球。
基于 NTL 的城市应用的关键议题:进展与挑战
描述城市发展的特征
机器学习和深度学习方法已广泛应用于地理空间分析,
包括基于 NTL 的城市测绘。
这些方法通常涉及使用非结构化数据,
包括 NTL 图像和其他特征,
例如 NTL 索引的核密度,
以及各种机器学习模型和分类策略。
使用 NTL 强度和 NDVI 以及区域增长 SVM 方法迭代确定中国 25 个特大城市的城市建成区。
在Google Earth Engine上部署了基于六边形像素的随机森林模型以及 Landsat 和 NTL 图像,
并绘制了印度、墨西哥和美国的城市建成区地图。
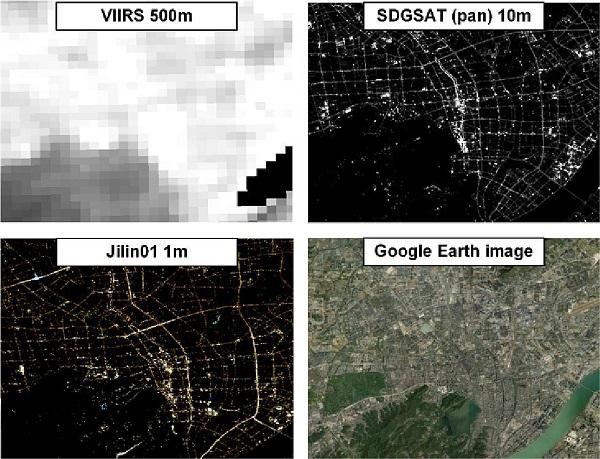
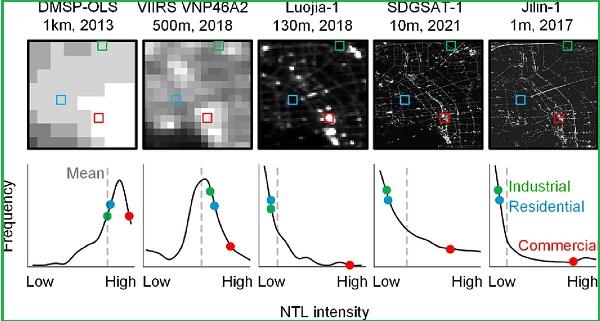
从 VIIRS (500 m)、SDGSAT-1(40 m,全色)和 Jilin01 (1 m)收集的 NTL 图像,
以及相应的“白天”Google 地球图像(城市:中国杭州市中心)。
绘制社会经济和环境变量图
NTL 数据城市应用的另一个重要领域是社会经济和环境变量的映射,
例如 GDP、人口和能源消耗。
这些变量通常是根据行政边界(例如国家、州和城市级别)记录的,
因此不太适合空间分析。
这往往导致相应政府机构在收集和发布数据方面存在1-2年的滞后,
阻碍了及时的代表性。
对于现场收集的其他变量(例如,来自气象站的 PM2.5),
数据需要进行空间外推以进行全面的呈现和分析。
对城市化引起的社会经济和环境变化的空间明确和及时的理解对于研究城市化至关重要。
鉴于这些变量与人类活动之间的密切相关性,
NTL 数据已被广泛认为是估计这些变量并将其空间化到网格中的有用代理。
调查人类活动
研究利用多年或时间序列的 NTL 数据进行前后比较,
以说明某些事件对人类活动及其恢复模式的影响。
例如比较了中国主要城市疫情前和疫情前三个月的 NTL 强度,
得出人类活动急剧下降3%-25%的结论。
除了简单的比较之外,
还采用统计和时间序列分析技术来识别 NTL 数据对人类活动的干扰,
例如游程编码以及使用 Loess(STL)的季节和趋势分解。
绘制光污染地图
人类住区发出的夜光不仅改变了城市地区的夜景,
而且还影响到数百公里外的偏远自然地区。
人们使用不同的术语来描述这些夜灯,
例如光污染或室外人造光照明。
这些术语描述不同的对象,
但它们在研究中通常可以互换。
尽管测量光污染的方法有多种,
但在许多方面仍然存在挑战。
一个主要挑战是遥感 NTL 图像的监测受到光谱带设置、
移动光源的影响和天顶视角等因素的限制。
考虑到灯的光谱宽度,
全色 NTL 传感器可能会很大程度上低估天空亮度,
因为它们对蓝色光谱的敏感性较弱。
其他应用
NTL 图像对城市研究的许多其他领域做出了贡献。
这些应用包括实验室实验和模拟或现场测量,
但由于 NTL 数据最近的激增,
开始纳入 NTL 数据。
研究的一个重要领域是夜间人造光 (ALAN) 对生态系统的影响。
ALAN 是城市生态系统的主要威胁,
研究表明植物物候发生变化,
例如提前树芽萌发和延迟叶子着色。
此外,ALAN 还改变了动物的行为,
例如鸟类迁徙、鸟类栖息地选择和蝙蝠扩散。
基于 NTL 的城市应用的未来研究方向
基于我们对过去三十年 NTL 数据用于研究城市化的趋势的分析,
以及对基于NTL的主要城市应用的回顾,
提出未来的应用需要在以下四个相互关联的方向上取得进展。
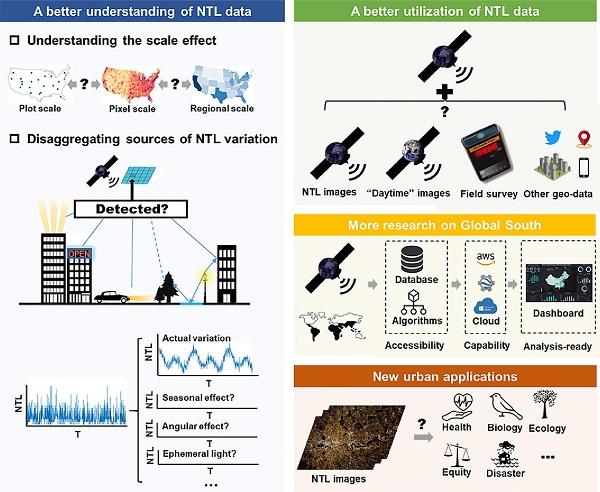
方向一:更好地理解 NTL 数据
- 了解 NTL 数据的尺度效应和变化来源
- 分解 NTL 变异的来源
方向二:将 NTL 数据与其他类型的地理空间数据集成,以提高 NTL 利用率
- 整合多源 NTL 数据
- 协同 NTL 数据与其他地理空间数据
方向三:对南半球进行更多研究
方向四:利用新的NTL数据产品开发新的城市应用
总结
本文回顾了过去 30 年来基于 NTL 的城市应用的研究趋势、主要进展和挑战,
并提出了未来的方向。
尽管最近基于 NTL 的应用激增,
但据评估表明,
未来的城市 NTL 研究不仅应关注应用,
还应旨在更好地理解 NTL 数据的特征和不确定性,
通过与其他数据集融合来增强 NTL 数据的能力,
提高数据可访问性并探索新的应用领域。
本文内容来源于网站:https://www.sciencedirect.com/science/article/pii/S0924271623001521,由小编整理编译
本文链接 :城市夜光遥感应用:进展、挑战和前景