LiDAR 完整指南介绍:激光探测和测距
访问量: 626 次浏览
什么是激光探测和测距 (LiDAR)?
LiDAR 的全称是 Light Detection and Ranging (激光探测及测距),
LIDAR 是一种主动测量方式,
主要由激光发射部分、接收部分组成、信号处理部分组成,
从其名称可以发现 LIDAR 的两个主要基本功能是测距和探测。
根据具体应用,
可以使用不同的波长,
但最常用的是红外线(IR)。
LIDAR 应用于很多领域,
主要包括但不限于以下学科:计算机视觉、自动化、机电、测绘、机械、土木等。
每个学科侧重点不一样,
大致有以下具体应用:无人驾驶、机器人、移动测量、工业元件检测、BIM 等。
LiDAR 101
LiDAR 从根本上说是一种距离技术,
LiDAR 系统从飞机或直升机上向地面发送光线。
该脉冲撞击地面并返回到传感器。
它测量光线返回传感器所需的时间,
通过记录返回时间,
这就是 LiDAR 测量距离的方式。
事实上,
这也是 LiDAR 得名的原因,激光探测和测距。
LiDAR 的工作原理
LiDAR 是一种采样工具,
其每秒发送超过160,000 个脉冲。
每秒钟每米的像素会收到大约 15 个脉冲,
这就是 LiDAR 点云创建数百万个点的原因。

LiDAR 系统非常准确,因其在平台中控制,
例如,垂直方向的精度仅为15厘米,
水平方向的精度为40厘米。
当飞机在空中飞行时,
LiDAR 装置从一侧到另一侧扫描地面,
虽然有些脉冲将直接低于最低点,
但大多数脉冲以一定角度(偏离最低点)传播,
因此,当 LiDAR 系统计算高程时,
它还会考虑角度问题。
通常,线性 LiDAR 的条带宽度为3,300英尺。
但像 Geiger LiDAR 等新技术可以扫描 16,000 英尺的宽度。
与传统的 LiDAR 相比,
这种类型的 LiDAR 可以覆盖更广泛的占地面积。
LiDAR 可以生成什么?
1.返回次数
想象一下,
当在森林里徒步旅行时,
你仰望天空,
如果能看到光,
这意味着 LiDAR 脉冲也可以穿过。
此外,这也表示 LiDAR 可以击中裸露的地面或矮小的植被。

大量的光线就像阳光一样穿透森林的树冠。
但 LiDAR 不一定只会击中裸露的地面。
在森林地区,
它可以反射到森林的不同部分,
直到脉冲最终到达地面。
通过使用 LiDAR 获取裸露的地面点,
就不会用 X 射线穿透植被。
相反,实际上是在透过树叶的缝隙窥视。
当它击中树枝时,
会获得多次击中或返回。
2.返回编号
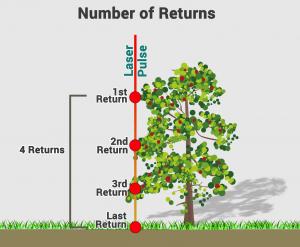
在森林中,
激光脉冲向下移动。
当光线照射到森林的不同部分时,
会得到“返回编号”。
例如,将获得第 1 次、第 2 次、第 3 次返回,
直到它最终击中裸露的地面。
如果没有森林阻隔,它就会撞到地面。
有时光脉冲不会反射任何东西。
与树木的情况一样,
一个光脉冲可以有多个回波。
LiDAR 系统可以记录从树冠顶部开始,
通过树冠一直到地面的信息。
这使得 LiDAR 对了解森林结构和树木的形状很有价值。
3.数字高程模型
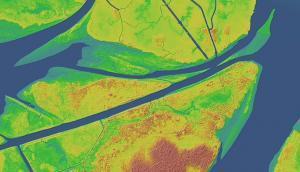
数字高程模型 (DEM) 是地球表面的裸露地球(地形)模型。
通过仅使用地面回波,即可以构建 DEM。
但这与数字地形模型 (DTM) 不同,
DTM 包含等高线。
通过使用 DEM,可生成其他产品。
例如,可以创建:
- 斜率(以度数或百分比表示的上升或下降);
- 坡向(坡度方向);
- 山体阴影(考虑照明角度的地形阴影)。
4.数字表面模型

正如大家所了解的,
LiDAR 在森林中进行观察,
最终光线到达地面,
可看到裸地返回。
数字曲面模型(DSM)结合了自然曲面和建筑曲面的高程。
例如,
它增加了建筑物、树冠、电力线和其他要素的高程。
5.冠层高度模型
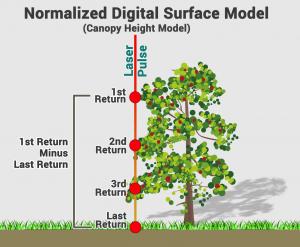
冠层高度模型 (CHM) 能够提供地面地形特征的真实高度,
通常还将这种高程模型称为归一化数字表面模型 (nDSM)。
首先,
采用包含自然和建筑特征(如树木和建筑物)的 DSM。
接下来,从裸地 (DEM) 中减去这些高程。
当将两者相减时,
会显示表面特征,
它代表了离地面的真实高度。
6.光强度
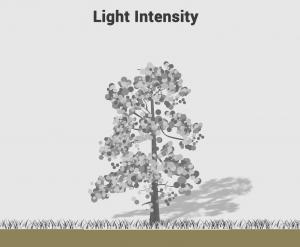
LiDAR 回波的强度随反射回波表面物体的组成而变化。
反射百分比称为 LiDAR 强度。
但是有几种因素会影响光强度。
例如,距离、入射角、光束、接收器和表面成分等。
当脉冲倾斜得更远时,返回能量会减少。
光强度对于区分土地利用和覆盖特征用处较大。
例如,不透水表面在光强图像中非常突出。
这就是为什么光强度适合于图像分类,
如基于对象的图像分析。
7.点分类
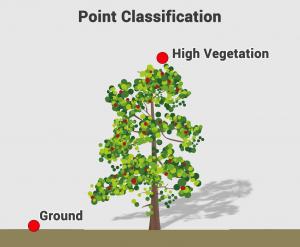
美国摄影测量与遥感协会 (ASPRS) 为 LiDAR 点分类分配了一组分类代码。
例如,类别可以包括地面、植被(低、中、高)、建筑物和水等。
某种情况下,点分类可能属于多个类别。
如果是这种情况,
通常会将这些点标记为次要类别。
供应商可能会也可能不会对 LiDAR 进行分类。
代码由反射的激光脉冲以半自动方式生成。
并非所有供应商都添加此 LAS 分类字段。
实际上,通常是事先在合同中约定的。
开放和免费的 LiDAR 资源
LiDAR 数据是一种稀有而珍贵的资源,
由于开放数据程序,
它们变得越来越广泛。
关于 LiDAR 数据的更多详情,
请参阅 6 大免费 LiDAR 数据源的列表(https://gisgeography.com/top-6-free-lidar-data-sources/)。
LiDAR 有哪些类型?
LiDAR 系统的类型不同之处在于:
- 占地面积
- 波长
- 位置对齐
Profiling LiDAR
Profiling LiDAR 是20世纪80年代第一个使用的系统,
它致力于研究电力线等直线特征。
Profiling LiDAR 在一条线上发出单独的脉冲,
在固定的最低点,沿单个样带测量高度。
小型 LiDAR
小型 LiDAR 是如今主要使用的一种。
它以大约 20 度的扫描角度进行扫描,
并前后移动。
如果超过 20 度,
LiDAR 仪器可能会开始看到树木的侧面,
而不是直接向下的角度。
- 地形 LiDAR 通常使用近红外光绘制土地;
- 测深 LiDAR 利用透水绿光来测量海底和河床高度。
大尺寸 LiDAR
大尺寸 LiDAR 使用 20m 尺寸的完整波形,
但其精度很低,
脉冲返回可以包括倾斜的地形,
NASA 的两项著名实验使用了这种类型的 LiDAR:
- SLICER(通过回声恢复扫描树冠 LiDAR 成像仪);
- LVIS(激光植被成像传感器)。
地面 LiDAR
地面 LiDAR 安装在三脚架上,扫描半球,
它特别适合扫描建筑物,
在地质学、林业和建筑业也有一定的应用。
Geiger(盖革) 模式 LiDAR
盖革模式 LiDAR 仍处于体验状态。
它专门从事高空扫描,
由于扫描范围极广,
因此与其他类型的 LiDAR 相比,
它可以覆盖更多的地面范围。
LiDAR 系统组件
机载 LiDAR 有 4 个主要部分。
它们协同工作,
产生高度准确、可用的结果,
内容如下:
- LiDAR 传感器: 当飞机飞行时,
传感器会左右扫描地面。
脉冲通常在绿色或近红外波段。 - GPS 接收器: GPS 接收器跟踪飞机的高度和位置。
该轨迹对于准确的地形和高程值很重要。 - 惯性测量单元 (IMU): 当飞机飞行时,
IMU 会跟踪其倾斜度。
LiDAR 系统使用倾斜来准确测量脉冲的入射角。 - 数据记录器:当 LiDAR 扫描表面时,
计算机会记录所有脉冲返回,
这些记录被转换成海拔高度。
全波形 vs 离散波形
LiDAR 系统以两种方式存储返回的数据:
- 全波形
- 离散 LiDAR
离散 LiDAR
想象一下 LiDAR 脉冲扫描森林区域,
会得到第 1、第 2、第 3 次回波,
由于脉冲击中多个分支,
通过裸地返回得到一个大的最终脉冲。
当将数据记录为单独的回波时,
这就是“离散回波 LiDAR”。
简而言之,
离散 LiDAR 获取每个峰值并分离每个回波。
全波形 LiDAR
当您将整个回波记录为一个连续波时,
这就是全波形 LiDAR。
因此,只需计算峰值,就能使其离散。
尽管全波形数据更加复杂,
但 LiDAR 正在向全波形系统迈进。

LiDAR 项目和应用
- 林业:林业人员利用 LiDAR 更好地了解树木的结构和形状;
- 自动驾驶汽车:自动驾驶汽车利用 LiDAR 扫描仪检测行人、骑自行车的人、停车标志和其他障碍物;
- 考古学:考古学家利用 LiDAR 在地面上寻找方形图案,
这些图案是玛雅和埃及文明建造的古老建筑和金字塔; - 水文:水文学家根据 LiDAR 划定河流秩序和支流。
本文链接 :LiDAR 完整指南介绍:激光探测和测距