摘要: 激光雷达或光探测和测距,是一种主动遥感系统,可用于测量广阔区域的植被高度。本文将介绍基本的 LiDAR(激光雷达)概念,包括: 什么是 LiDAR 数据; 激光雷达数据的关键属性; LiDAR 数据如何用于测量树木。 关键概念 为什么选择 LiDAR 科...
激光雷达或光探测和测距,是一种主动遥感系统,可用于测量广阔区域的植被高度。本文将介绍基本的 LiDAR(激光雷达)概念,包括:
- 什么是 LiDAR 数据;
- 激光雷达数据的关键属性;
- LiDAR 数据如何用于测量树木。
关键概念
为什么选择 LiDAR
科学家通常需要描述大区域的植被特征,以回答生态系统或区域范围内的研究问题。因此,需要能够估计大面积关键特征的工具,因为没有资源来测量每一棵树或灌木。
传统的实地测量树木的方法是资源密集型的,并且限制了可以表征的植被数量。遥感意味着实际上并没有用手测量事物。我们正在使用传感器来捕获有关景观的信息,并记录可以用来估计条件和特征的事物。为了测量大面积的植被或其他数据,我们需要能够使用自动传感器快速进行多次测量的遥感方法。
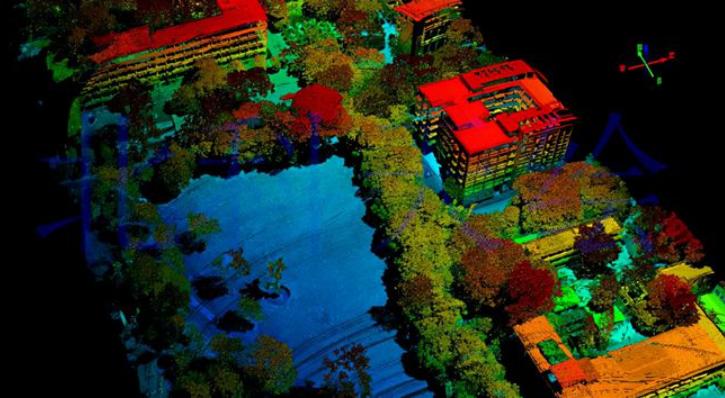
国家生态观测网的机载观测平台(NEON AOP)在 Soaproot Saddle 站点收集的激光雷达数据。LiDAR 或光探测测距(有时也称为主动激光扫描)是一种遥感方法,可用于绘制结构图,包括整个区域的植被高度、密度和其他特征。LiDAR 直接测量地面植被的高度和密度,使其成为科学家研究大面积植被的理想工具。
LiDAR 的工作原理
激光雷达如何工作?
激光雷达是一种主动遥感系统。有源系统意味着系统本身会产生能量(在本例中为光)来测量地面上的物体。在 LiDAR 系统中,光是从快速发射的激光器发出的,可以想象从激光光源发出的光快速频闪。这种光传播到地面并反射建筑物和树枝等物体,反射的光能返回到记录它的 LiDAR 传感器。LiDAR 系统测量发射光传播到地面并返回所需的时间,该时间用于计算行进距离,并将行进的距离转换为海拔。这些测量是使用激光雷达系统的关键组件进行的,包括识别 X、Y。
如何使用光能测量树木
光能是光子的集合。当构成光的光子向地面移动时,它们会撞击树枝等物体。一些光从这些物体反射并返回到传感器。如果物体很小,并且它周围有缝隙可以让光线穿过,那么一些光线会继续向下射向地面。因为一些光子从树枝等物体反射,而其他光子则继续向下射向地面,因此可以从一个光脉冲中记录多次反射。
激光雷达波形
返回传感器的能量分布产生了我们所说的波形,返回到 LiDAR 传感器的能量称为“强度”。更多光子或更多光能返回传感器的区域会在能量分布中产生峰值。波形中的这些峰值通常代表地面上的物体,如树枝、树叶或建筑物。
科学家如何使用 LiDAR 数据
LiDAR 数据有许多不同的用途:
- LiDAR 数据通常用于推导高分辨率高程数据 LiDAR 数据历来用于生成高分辨率高程数据集
-
LiDAR 数据也被用于推导有关植被结构的信息,包括:
- 树冠高度
- 雨棚盖
- 叶面积指数
- 垂直森林结构
- 物种识别(如果密度较低的森林使用高点密度 LiDAR)
离散与全波形激光雷达
光能的波形或分布返回到 LiDAR 传感器。然而,这种回报可能以两种不同的方式记录。
- 离散返回 LiDAR 系统记录,波形曲线中峰值的各个(离散)点。离散返回 LiDAR 系统识别峰值并在波形曲线中的每个峰值位置记录一个点。这些离散的或单独的点称为回报。离散系统可能会记录每个激光脉冲的 1-4(有时更多)回波。
- 全波形激光雷达系统,记录返回光能的分布。因此,全波形 LiDAR 数据处理起来更加复杂,但与离散返回 LiDAR 系统相比,它们通常可以捕获更多信息。
激光雷达文件格式
无论是作为离散点还是完整波形收集,大多数情况下 LiDAR 数据都以离散点的形式提供。离散返回 LiDAR 点的集合称为 LiDAR 点云。
存储 LIDAR 点云数据的常用文件格式称为 .las,这是美国摄影测量与遥感协会 (ASPRS) 支持的格式。最近,.laz 格式已由 LasTools 的 Martin Isenberg 开发。不同之处在于 .laz 是 .las 的高度压缩版本。从 LiDAR 点云数据派生的数据产品通常是 GeoTIFF (.tif) 格式的栅格文件。
LiDAR 数据属性:X、Y、Z、强度和分类
LiDAR 数据属性可能会有所不同,具体取决于数据的收集和处理方式,可通过查看元数据来确定每个激光雷达点的可用属性。所有激光雷达数据点都将具有关联的 X、Y 位置和 Z(高程)值。大多数激光雷达数据点都会有一个强度值,代表传感器记录的光能量。
一些 LiDAR 数据也将被“分类”,不是最高机密,但有关于数据内容的规范。LiDAR 点云的分类是一个额外的处理步骤。分类只是表示激光返回反射的物体类型。因此,如果光能从树上反射出来,它可能被归类为“植被”。如果它从地面反射回来,它可能会被归类为“地面”。
一些 LiDAR 产品将被归类为“地面、非地面”。一些数据集将被进一步处理以确定哪些点反映了建筑物和其他基础设施,一些激光雷达数据会根据植被类型进行分类。
总结
LiDAR 系统使用激光、GPS 和 IMU 来估计地面上物体的高度, 离散的 LiDAR 数据是从波形中生成的,每个点代表沿返回能量的峰值能量点。离散 LiDAR 点包含 x、y 和 z 值。z 值用于生成高度,LiDAR 数据可用于使用各种方法估算树高甚至树冠覆盖。
