摘要: 点云是用于动态存储通常来自激光雷达系统的数据的点的集合。激光雷达是一种每秒发送超过 160,000 个脉冲的采样工具。每个 1 米像素包含大约 15 个光脉冲。一旦 LiDAR 系统 收集到每个单独的读数,处理后的数据就成为点云数据。光脉冲代表点云中的数百万个...
点云是用于动态存储通常来自激光雷达系统的数据的点的集合。激光雷达是一种每秒发送超过 160,000 个脉冲的采样工具。每个 1 米像素包含大约 15 个光脉冲。一旦 LiDAR 系统 收集到每个单独的读数,处理后的数据就成为点云数据。光脉冲代表点云中的数百万个点数据。
点云属性
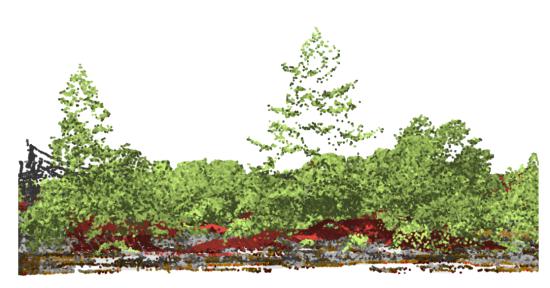
每个点存储具有描述每个点的多个属性的信息(组件)。在最基本的层面上,属性包括X、Y 和 Z 坐标。每个点都使用 GPS 时间戳和惯性测量单位进行检查。但是点云也可以存储关于强度、颜色和时间的属性信息。当 LiDAR 系统扫描地面时,整个点集就它们在表面 上击中的物体而言是未分类的。自动化例程有助于对点云 进行分类。例如,类别可以包括地面、植被(低、中和高)、建筑物、水等,点分类可能属于多个类别。
激光雷达格式

存储点云数据最常见的文件格式是 LAS 文件格式。这种二进制文件格式维护特定于 LIDAR 的信息而不会丢失信息。LAS 文件可供公众使用,而不是像 ASCII 那样的专有文件格式。点的密集网络如此之大,以至于 LiDAR 将点数据拆分为多个文件。
压缩 LAS 文件时,压缩后的文件格式将变为 LAZ。通过使用这种文件格式,可节省大量存储空间而不会丢失信息。最后,LAS 数据集 (LASD) 是一种专门用于Esri ArcGIS的 参考或指针类型的数据集,不仅可以获得 3D 点属性,还可以使用 LAS 数据集构建三角曲面和高程模型。
