遥感(RemoteSensing),通常是指通过某种传感器装置,在不与研究对象直接接触的情况下, 获得其特征信息,并对这些信息进行提取、加工、表达和应用的一门科学技术。
作为一个术语,遥感出现于1962年,而遥感技术在世界范围内迅速的发展和广泛的使用, 是在1972年美国第一颗地球资源技术卫星(LANDSAT-1)成功发射并获取了大量的卫星图像之后。 近年来,随着地理信息系统技术的发展,遥感技术与之紧密结合,发展更加迅猛。
遥感技术的基础,是通过观测电磁波,从而判读和分析地表的目标以及现象,其中利用了地物的电磁波特性, 即“一切物体,由于其种类及环境条件不同,因而具有反射或辐射不同波长电磁波的特性”(图12-1), 所以遥感也可以说是一种利用物体反射或辐射电磁波的固有特性,通过观测电磁波, 识别物体以及物体存在环境条件的技术。 图 12.1 几种常见地物(水、绿色植被、裸旱地)的电磁波反射曲线 # 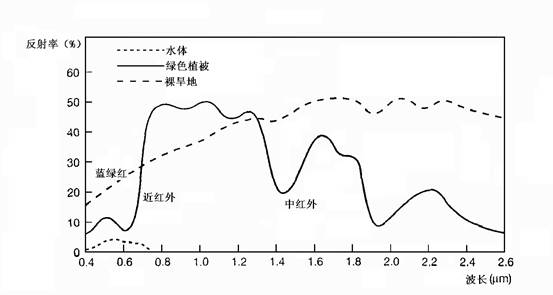
在遥感技术中,接收从目标反射或辐射电磁波的装置叫做遥感器(RemoteSensor), 而搭载这些遥感器的移动体叫做遥感平台(Platform),包括飞机、人造卫星等, 甚至地面观测车也属于遥感平台。 通常称用机载平台的为航空遥感(AerialRemote Sensing),而用星载平台的称为航天遥感。
按照遥感器的工作原理, 可以将遥感分为被动式遥感(Passive RemoteSensing)和主动式遥感(Active RemoteSensing)两种, 而每种方式又分为扫描方式和非扫描方式, 其中陆地卫星使用的MSS(MultispectralScanner)和TM(ThematicMapper)属于被动式、扫描方式的遥感器(图12-2), 而合成孔径雷达(SAR-SyntheticAperture Radar)属于主动式、扫描方式的遥感器。 图 12.2 多光谱扫描仪示意图[Curran] # 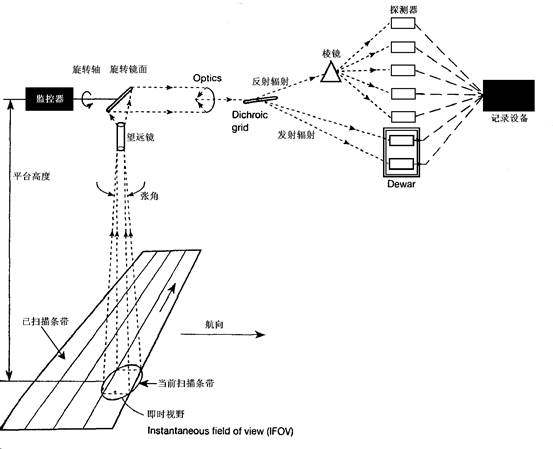
从遥感的定义中可以看出,首先,遥感器不与研究对象直接接触,也就是说,这里的“遥”并非指“遥远”; 其次,遥感的目的是为了得到研究对象的特征信息; 最后,通过传感器装置得到的数据,在被使用之前,还要经过一个处理过程。 图12-3描述了从获取遥感数据到应用的过程。 图 12.3 遥感数据过程 # 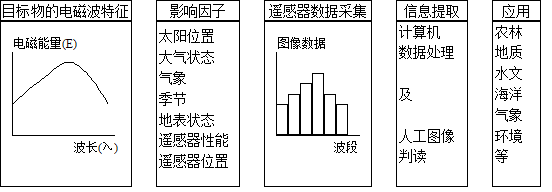
遥感数据的处理——通常是图像形式的遥感数据的处理, 主要包括纠正(包括辐射纠正和几何纠正)、增强、变换、滤波、分类等功能,其目的主要是为了提取各种专题信息, 如土地建设情况、植被覆盖率、农作物产量和水深等等(图12-4)。 遥感图像处理可以采取光学处理和数字处理两种方式,数字图像处理由于其可重复性好、便于与GIS结合等特点, 目前被广泛采用。 下面简单介绍数字图像处理的主要功能。 图 12.4 武汉市东湖附近TM合成图像,长江上的轮船清晰可见 # (合成方案:R=TM7,G=TM4,B=TM2,经增强处理)
1)图像纠正
图像纠正是消除图像畸变的过程,包括辐射纠正和几何纠正。 辐射畸变通常由于太阳位置,大气的吸收、散射引起; 而几何畸变(图12-5)的原因则包括遥感平台的速度、姿态变化,传感器,地形起伏等, 几何纠正包括粗纠正和精纠正两种,前者根据有关参数进行纠正; 而后者通过采集地面控制点(GCPs,Ground Control Points),建立纠正多项式, 进行纠正。 图 12.5 遥感图像几何畸变的各种情形[Lillesand and Kiefer] # 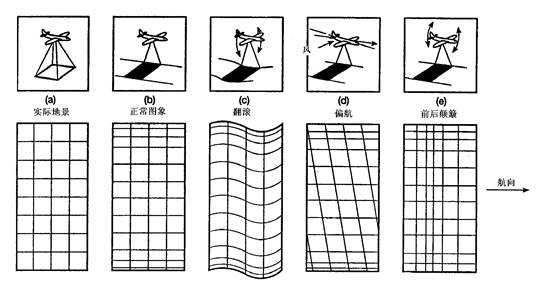
2)增强
增强的目的是为了改善图像的视觉效果,并没有增加信息量,包括亮度、对比度变化以及直方图变换等。
3)滤波
滤波分为低通滤波、高通滤波和带通滤波等,低通滤波可以去除图像中的噪声,而高通滤波则用于提取一些线性信息, 如道路,区域边界等。 滤波可以在空域上采用滤波模板操作,也可以在频域中进行直接运算。
4)变换
包括主成分分析(Principal ComponentAnalyst),色度变换以及傅立叶变换等, 还包括一些针对遥感图像的特定变换,如缨帽变换。
5)分类
利用遥感图像的主要目的是为了提取各种信息,一些特定的变换可以用于提取信息, 但是最主要的手段则是通过遥感图像分类(Classification)。 计算机分类的基本原理是计算图像上每个象元的灰度特征,根据不同的准则,进行分类。 遥感图像分类有两类方法, 即监督分类(SupervisedClassification)和非监督分类(UnsupervisedClassification), 前者需要事先确定各个类别及其训练区(TrainingArea),并计算训练区象元灰度统计特征, 然后将其它象元归并到不同类别; 后者则直接根据象元灰度特征之间的相似和相异程度进行合并和区分,形成不同的类别。 典型的监督分类算法有最小距离法、最大似然法、平行六面体法等; 而K-均值聚类属于非监督分类; 将人工神经网络(ANN,Artificial NeuralNetwork)应用于遥感分类,在有些情况下, 可以达到较好的分类效果。
遥感的出现,扩展了人类对于其生存环境的认识能力,较之于传统的野外测量和野外观测得到的数据, 遥感技术具有以下优点:
增大了观测范围;
能够提供大范围的瞬间静态图像,用于监测动态变化的现象;
能够进行大面积重复观测,即使是人类难以到达的偏远地区;
大大“加宽”了的人眼所能观察的光谱范围,遥感使用的电磁波波段从X光到微波,远远超出了可见光范围;而雷达遥感由于使用微波,可以不受制于昼夜、天气变化,进行全天候的观测;
空间详细程度高,航空相片的空间分辨率可以高达厘米级甚至毫米级。
与航空遥感相比,航天遥感能够进行连续的、全天候的工作,提供更大范围的数据,其成本更低, 是获取遥感数据的主要方式; 而航空遥感主要应用于临时性的、紧急的观测任务以获得高精度数据。 目前,世界上许多国家都已经发射了服务于不同目的的各种遥感卫星,其遥感器的空间分辨率和光谱分辨率也都各异, 形成了从粗到细的对地观测数据源系列, 可以用于监测从土地利用、农作物生长、植被覆盖到洪水、森林火灾、污染等现象的信息以及其动态变化。
总之,利用遥感技术,可以更加迅速、更加客观地监测环境信息; 同时,由于遥感数据的空间分布特性,可以作为地理信息系统的一个重要的数据源,以实时更新空间数据库。
表12-1:几种常用的遥感卫星及其遥感器参数
卫星传感器 | 波段( μ m) | 空间分辨率 | 覆盖范围 | 周期 | 主要用途 |
Landsat TM | 0.45-0.52 0.52-0.60 0.63-0.69 0.76-0.90 1.55-1.75 10.4-12.4 2.05-2.35 | 30m(1-5,7波段) | 185km× 185km | 16天 | 水深、水色 水色、植被 叶绿素、居住区 植物长势 土壤和植物水分 云及地表温度 岩石类型 |
SPOT-HRV | 0.50-0.59 0.61-0.68 0.79-0.89 0.51-0.73 | 20m 20m 20m 10m | 60km× 60km | 26天 | 水色、植物状况 叶绿素、居住区 植物长势 制图 |
NOAA-VHRR | 0.58-0.68 0.72-1.10 3.55-3.93 10.3-11.3 11.5-12.5 | 1.1km | 2400km × 2400km | 0.5天 | 植物、云、冰雪 植物、水陆分界 热点、夜间云 云及地表温度 大气及地表温度 |
IKONOS[1]_ | 0.45-0.9 0.45-0.52 0.52-0.60 0.63-0.69 0.76-0.90 | 0.82m 4m 4m 4m 4m | 11km× 11km | 14天 |