线性规划(混合整数)¶
本文档通过举例说明Sage可以解决的几个问题,说明了线性规划(LP)和混合整数线性规划(MILP)在SAGE中的使用。给出的大多数例子都是出于图论的考虑,在没有这个领域的任何具体知识的情况下应该是可以理解的。作为组合学中的一个工具,使用线性规划相当于理解如何通过线性约束重新表述优化(或存在)问题。
这是这本书中一章的译文 Calcul mathematique avec Sage 。这本书现在存在于 English, too 。
定义¶
Here we present the usual definition of what a linear program is: it is defined by a matrix A: mathbb{R}^m mapsto mathbb{R}^n, along with two vectors b,c in mathbb{R}^n. Solving a linear program is searching for a vector x maximizing an objective function and satisfying a set of constraints, i.e.
在哪里订购 u leq u' 两个向量之间的关系意味着 u' 的条目数成对大于 u 。我们还写道:
同样地,我们也可以说,求解一个线性规划相当于最大化一个定义在多面体上的线性函数(原图或 A^{-1} (leq b) )。然而,这些定义并没有告诉我们如何在组合学中使用线性规划。在接下来的内容中,我们将展示如何解决背包问题、最大匹配问题和流问题等优化问题。
混合整数线性规划¶
伴随着线性规划的定义而来的是坏消息:线性规划可以在多项式时间内求解。这确实是个坏消息,因为这将意味着,除非我们定义指数规模的LP,否则我们不能指望LP解决NP完全问题,这将是令人失望的。从好的方面来看,如果我们被允许指定不同类型的约束:要求某些变量是整数而不是实值,那么解线性规划就成了NP-完全的。这样的线性规划实际上被称为“混合整数线性规划”(有些变量可以是整数,有些是实数)。因此,我们可以预期在MILP框架中发现 wide 表现力的范围。
实用¶
这个 MILP 班级¶
这个 MILP Sage中的类代表一个MILP!它也可用于求解正则线性规划问题。它具有非常少的方法,用于定义我们的约束和变量集,然后在计算后读取求解器找到的解。还可以将使用Sage定义的MILP导出到 .lp 或 .mps 文件,大多数求解器都能理解。
让我们请Sage来解决以下LP:
要实现这一点,我们需要定义一个对应的 MILP 对象,以及3个变量 x , y 和 z **
sage: p = MixedIntegerLinearProgram()
sage: v = p.new_variable(real=True, nonnegative=True)
sage: x, y, z = v['x'], v['y'], v['z']
接下来,我们设置目标函数
sage: p.set_objective(x + y + 3*z)
最后,我们设置了约束
sage: p.add_constraint(x + 2*y <= 4)
sage: p.add_constraint(5*z - y <= 8)
这个 solve 方法默认情况下返回目标函数达到的最佳值
sage: round(p.solve(), 2)
8.8
我们可以读取求解器找到的最优分配 x , y 和 z 通过 get_values 方法
sage: round(p.get_values(x), 2)
4.0
sage: round(p.get_values(y), 2)
0.0
sage: round(p.get_values(z), 2)
1.6
变数¶
在上例中,我们通过以下方式获取变量 v['x'] , v['y'] 和 v['z'] 。也就是说,较大的LP/MILP将要求我们将一个LP变量与许多Sage对象相关联,这些对象可以是整数、字符串,甚至可以是图的顶点和边。例如:
sage: x = p.new_variable(real=True, nonnegative=True)
有了这个新对象 x 我们现在可以使用以下命令编写约束 x[1],...,x[15] 。
sage: p.add_constraint(x[1] + x[12] - x[14] >= 8)
请注意,我们不需要定义 x 。实际上, x 将接受任何不变的对象作为键,就像字典所做的那样。我们现在可以写下
sage: p.add_constraint(x["I am a valid key"] +
....: x[("a",pi)] <= 3)
因为任何不可变的对象都可以用作键,所以双重索引变量 x^{1,1}, ..., x^{1,15}, x^{2,1}, ..., x^{15,15} 可以由以下对象引用 x[1,1],...,x[1,15],x[2,1],...,x[15,15]
sage: p.add_constraint(x[3,2] + x[5] == 6)
类型化变量和界限¶
Types : 如果希望变量仅采用整数值或二进制值,请使用 integer=True 或 binary=True 的论点 new_variable 方法。或者,也可以调用 set_integer 和 set_binary 方法:研究方法。
Bounds : 如果希望变量只接受非负值,则可以在调用 new_variable 带着这样的论点 nonnegative=True 。如果要为变量设置不同的上下限,请添加约束或使用 set_min , set_max 方法:研究方法。
基本线性规划¶
背包¶
这个 Knapsack 问题如下:给定同时具有权重和 usefulness ,我们希望装满容量受限的袋子,同时最大化袋子中所含物品的有用性(我们将考虑这些物品的有用性的总和)。出于本教程的目的,我们设置了袋子只能携带一定总重量的限制。
要实现这一点,我们必须关联到每个对象 o 在我们的收藏中 C 二元变量 taken[o] ,当对象在包中时设置为1,否则设置为0。我们正在努力解决以下MILP问题
使用Sage,我们将为我们的项目赋予随机权重::
sage: C = 1
sage: L = ["pan", "book", "knife", "gourd", "flashlight"]
sage: L.extend(["random_stuff_" + str(i) for i in range(20)])
sage: weight = {}
sage: usefulness = {}
sage: set_random_seed(685474)
sage: for o in L:
....: weight[o] = random()
....: usefulness[o] = random()
现在我们可以定义MILP本身
sage: p = MixedIntegerLinearProgram()
sage: taken = p.new_variable(binary=True)
sage: p.add_constraint(p.sum(weight[o] * taken[o] for o in L) <= C)
sage: p.set_objective(p.sum(usefulness[o] * taken[o] for o in L))
sage: p.solve() # abs tol 1e-6
3.1502766806530307
sage: taken = p.get_values(taken)
找到的解决方案(当然)是可以接受的。
sage: sum(weight[o] * taken[o] for o in L) # abs tol 1e-6
0.6964959796619171
我们要带手电筒吗?
sage: taken["flashlight"] # abs tol 1e-6
1.0
明智的建议。基于纯粹的随机考虑。
匹配¶
给出一张图 G ,匹配是一组成对不相交的边。空集是一个微不足道的匹配。因此,我们将注意力集中在最大匹配上:我们希望在图中找到基数为最大的匹配。计算图的最大匹配是一个多项式问题,这是Edmonds的一个著名结果。Edmonds的算法是基于局部改进的,并证明了如果给定的匹配不能被改进,则该匹配是最大的。在图论所能提供的那些算法中,该算法并不是最难实现的,尽管这个问题可以用非常简单的MILP来建模。
要做到这一点,我们需要--和前面一样--将一个二进制变量关联到我们的每个对象:图的边(值1表示对应的边包含在最大匹配中)。我们对边的限制是它们是不相交的,这就足够要求, x 和 y 作为两条边和 m_x, m_y 它们的关联变量,不平等 m_x + m_y leq 1 是满意的,因为我们确定他们两个不可能都属于匹配。因此,我们能够编写我们想要的MILP。然而,通过注意当且仅当两条边具有公共终点时,不能在匹配内同时获取两条边,就可以很容易地减少不等式的数量 v 。然后我们可以要求最多只有一条边入射到 v 被带到匹配的内部,这是一个线性约束。我们将解决以下问题:
让我们编写这个MILP::的SAGE代码
sage: g = graphs.PetersenGraph()
sage: p = MixedIntegerLinearProgram()
sage: matching = p.new_variable(binary=True)
sage: p.set_objective(p.sum(matching[e] for e in g.edges(sort=False, labels=False)))
sage: for v in g:
....: p.add_constraint(p.sum(matching[e]
....: for e in g.edges_incident(v, labels=False)) <= 1)
sage: p.solve()
5.0
sage: matching = p.get_values(matching, convert=bool, tolerance=1e-3)
sage: sorted(e for e, b in matching.items() if b) # random
[(0, 4), (1, 6), (2, 3), (5, 8), (7, 9)]
sage: len(_)
5
流动¶
图论中的另一个基本算法:最大流!它由给定的一个有向图和两个顶点组成 s, t ,在发送最大 flow 从… s 至 t 使用的边缘 G 每一个都有一个最大的容量。
这个问题的定义几乎就是它的LP公式。我们正在寻找与每条边相关联的实际值,这些值将表示在两种类型的约束下流过它们的流的强度:
到达顶点的流量(不同于 s 或 t )等于离开它的流量。
通过一条边的流量受这条边的容量限制。
这就是说,我们必须最大化离开的流量 s :所有这些都将最终落到 t ,因为其他顶点发送的数量与它们接收的数量相同。我们可以使用以下LP对流问题进行建模
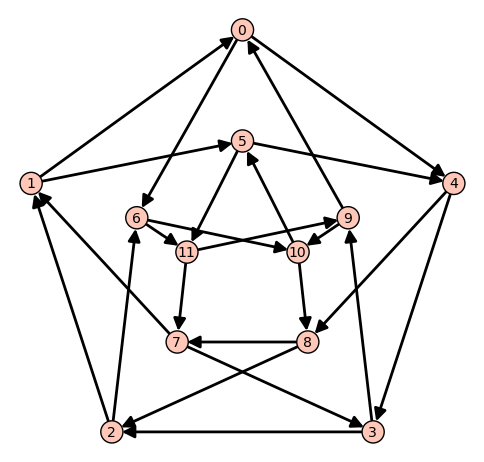
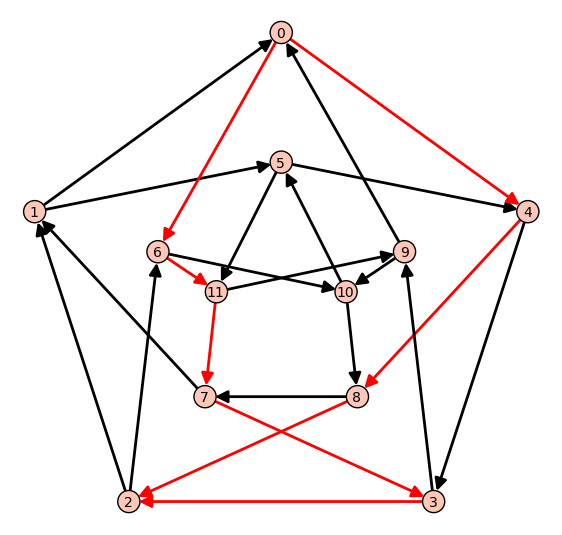
我们将解决Chvtal图的一个方向上的流问题,其中所有边的容量为1::
sage: g = graphs.ChvatalGraph()
sage: g = g.minimum_outdegree_orientation()
sage: p = MixedIntegerLinearProgram()
sage: f = p.new_variable(real=True, nonnegative=True)
sage: s, t = 0, 2
sage: for v in g:
....: if v != s and v != t:
....: p.add_constraint(
....: p.sum(f[v,u] for u in g.neighbors_out(v))
....: - p.sum(f[u,v] for u in g.neighbors_in(v)) == 0)
sage: for e in g.edges(sort=False, labels=False):
....: p.add_constraint(f[e] <= 1)
sage: p.set_objective(p.sum(f[s,u] for u in g.neighbors_out(s)))
sage: p.solve() # rel tol 2e-11
2.0
解算器(后端)¶
Sage通过调用特定的库来解决线性规划问题。目前支持下列库:
CBC: 来自的求解器 COIN-OR 是在开放源码许可但与GPL不兼容的Eclipse公共许可(EPL)下提供的。可以使用Shell命令安装CBC和Sage CBC后端::
$ sage -i -c sage_numerical_backends_coin
CPLEX: 专利,但通过IBM的学术倡议免费提供给研究人员和学生。自.以来 :issue:`27790` ,仅支持12.8及更高版本。
按照网站上的说明安装CPLEX,包括获取许可证密钥。
然后找到ILOG CPLEX Studio安装的安装目录,其中包含子目录
cplex,doc,opl等。设置环境变量CPLEX_HOME添加到此目录;例如,使用以下Shell命令(在MacOS上):$ export CPLEX_HOME=/Applications/CPLEX_Studio1210
或(在Linux上):
$ export CPLEX_HOME=/opt/ibm/ILOG/CPLEX_Studio1210
现在验证您将在子目录中找到的CPLEX二进制文件
cplex/bin/ARCH-OS正确启动,例如::$ $CPLEX_HOME/cplex/bin/x86-64_osx/cplex Welcome to IBM(R) ILOG(R) CPLEX(R) Interactive Optimizer...
只需为以下步骤设置此环境变量:使用Shell命令安装Sage CPLEX后端:
$ sage -i -c sage_numerical_backends_cplex
CVXOPT: 来自用于凸面优化的Python软件的LP求解器,使用内点法,总是安装在Sage中。
在GPL下获得许可。
-
在GPLv3下获得许可。此解算器始终作为默认解算器安装在Sage中。
Gurobi: 专利,但通过Gurobi的学术项目免费提供给研究人员和学生。
按照网站上的说明安装Gurobi,其中包括获取许可证密钥。安装应该使交互的GurobiShell
gurobi.sh在您的PATH。通过键入Shell命令来验证这一点gurobi.sh**$ gurobi.sh Python 3.7.4 (default, Aug 27 2019, 11:27:39) ... Gurobi Interactive Shell (mac64), Version 9.0.0 Copyright (c) 2019, Gurobi Optimization, LLC Type "help()" for help gurobi>
如果这不起作用,请调整您的
PATH或创建符号链接,以便gurobi.sh已经找到了。现在使用Shell命令安装Sage Gurobi后端::
$ sage -i -c sage_numerical_backends_gurobi
PPL: 来自BugSeng的解算器。
此解算器提供精确(任意精度)计算,始终安装在Sage中。
在GPLv3下获得许可。