 Source
Source备注
单击 here 下载完整的示例代码或通过活页夹在浏览器中运行此示例
同形异义词的类型¶
Homographies 是保持点对齐的欧几里得空间的变换。同形对应的特定情况对应于更多性质的守恒,例如平行度(仿射变换)、形状(相似变换)或距离(欧几里得变换)。
2D欧几里得空间(即,对于2D灰度或多通道图像)上的单应由3x3矩阵定义。所有类型的单应关系都可以通过传递变换矩阵或更简单变换的参数(旋转、缩放等)来定义它们构成了完整的变形。
这里显示了SCRICKIT-IMAGE中可用的不同类型的单应项,通过增加复杂性的顺序(即,通过减少约束的数量)。虽然我们在这里关注的是变换的数学属性,但教程 使用几何变换 解释如何将此类转换用于各种任务,如图像扭曲或参数估计。
import math
import numpy as np
import matplotlib.pyplot as plt
from skimage import data
from skimage import transform
from skimage import img_as_float
欧几里得(刚性)变换¶
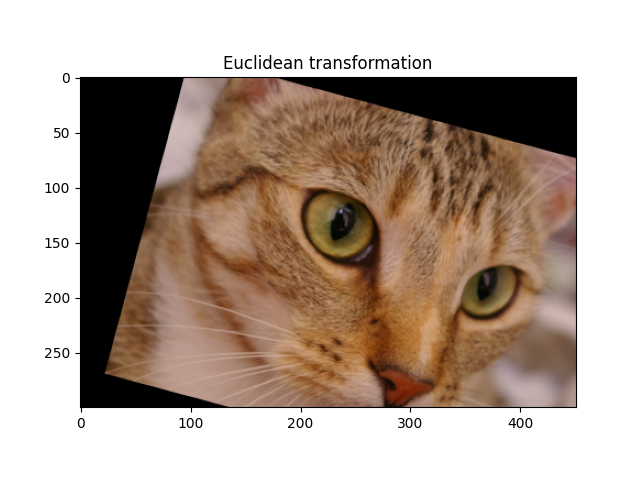
A Euclidean transformation ,也称为刚性变换,保持点对之间的欧几里得距离。它可以被描述为绕原点旋转,然后平移。
tform = transform.EuclideanTransform(
rotation=np.pi / 12.,
translation = (100, -20)
)
print(tform.params)
输出:
[[ 0.96592583 -0.25881905 100. ]
[ 0.25881905 0.96592583 -20. ]
[ 0. 0. 1. ]]
现在,让我们将此转换应用于图像。因为我们正试图重建 图像 转换后,查看 坐标 从输入图像到输出,这就是转换给我们的结果。相反,对于输出图像中的每个像素(坐标),我们希望找出它在输入图像中的位置。因此,我们需要使用 tform ,而不是 tform 直接去吧。
img = img_as_float(data.chelsea())
tf_img = transform.warp(img, tform.inverse)
fig, ax = plt.subplots()
ax.imshow(tf_img)
_ = ax.set_title('Euclidean transformation')
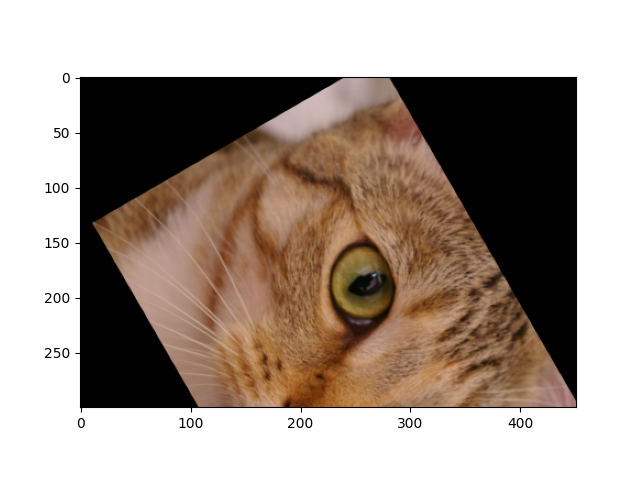
对于围绕图像中心的旋转,可以组成一个平移来改变第一个平移的原点、旋转,最后是逆平移。
rotation = transform.EuclideanTransform(rotation=np.pi/3)
shift = transform.EuclideanTransform(translation=-np.array(img.shape[:2]) / 2)
# Compose transforms by multiplying their matrices
matrix = np.linalg.inv(shift.params) @ rotation.params @ shift.params
tform = transform.EuclideanTransform(matrix)
tf_img = transform.warp(img, tform.inverse)
fig, ax = plt.subplots()
_ = ax.imshow(tf_img)
相似变换¶
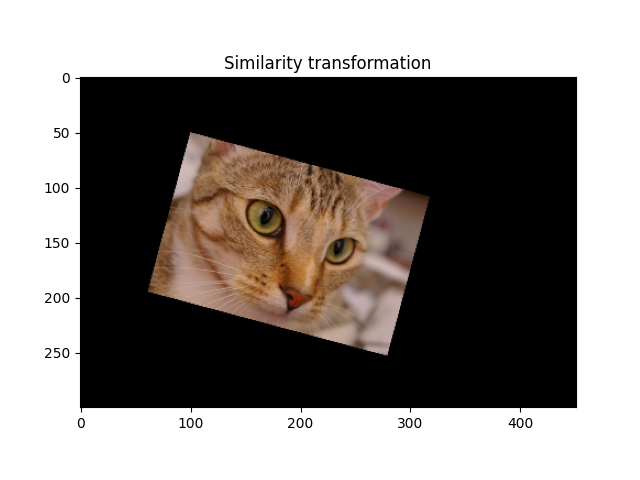
A similarity transformation 保留对象的形状。它结合了缩放、平移和旋转。
tform = transform.SimilarityTransform(
scale=0.5,
rotation=np.pi/12,
translation=(100, 50))
print(tform.params)
tf_img = transform.warp(img, tform.inverse)
fig, ax = plt.subplots()
ax.imshow(tf_img)
_ = ax.set_title('Similarity transformation')
输出:
[[ 0.48296291 -0.12940952 100. ]
[ 0.12940952 0.48296291 50. ]
[ 0. 0. 1. ]]
仿射变换¶
一个 affine transformation 保留线条(因此对象的对齐方式)以及线条之间的平行度。它可以分解为一个相似变换和一个 shear transformation 。
tform = transform.AffineTransform(
shear=np.pi/6,
)
print(tform.params)
tf_img = transform.warp(img, tform.inverse)
fig, ax = plt.subplots()
ax.imshow(tf_img)
_ = ax.set_title('Affine transformation')

输出:
[[ 1. -0.5 0. ]
[ 0. 0.8660254 0. ]
[ 0. 0. 1. ]]
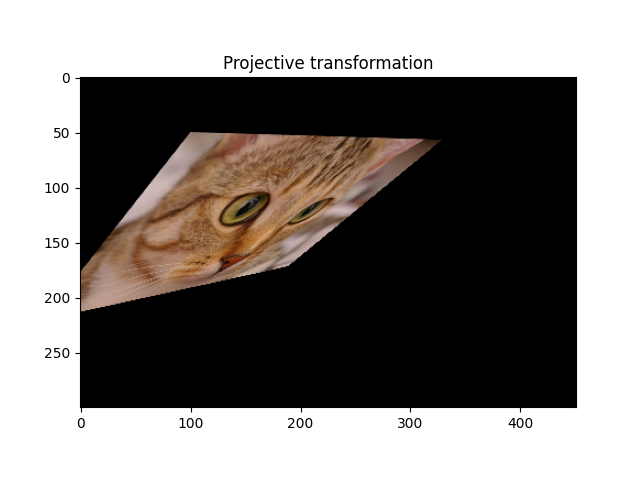
射影变换(单应)¶
A homography 也称为射影变换,它保留了直线,但不一定是平行的。
另请参阅¶
使用几何变换 用于合成变换或估计其参数
调整比例、调整大小和缩小比例 用于简单的重新调整比例和调整大小操作
skimage.transform.rotate()用于围绕图像中心旋转图像
脚本的总运行时间: (0分0.775秒)