 Source
Source备注
单击 here 下载完整的示例代码或通过活页夹在浏览器中运行此示例
基于RANSAC的稳健匹配¶
在这个简化的示例中,我们首先生成两个合成图像,就好像它们是从不同的视角拍摄的一样。
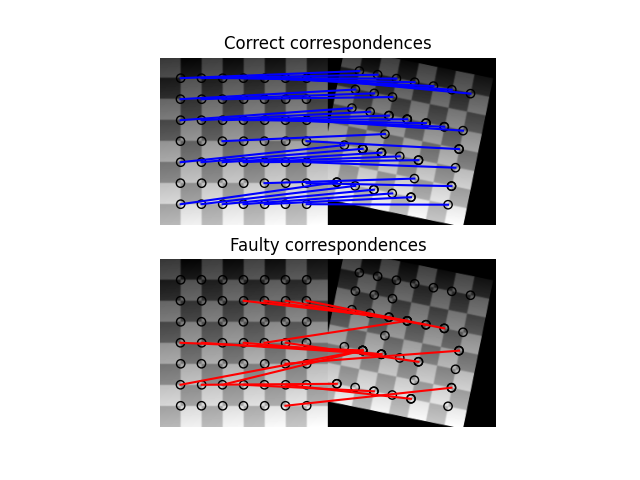
在下一步中,我们在两幅图像中找到兴趣点,并基于它们周围小邻域的平方差的加权和来找到对应关系。请注意,此测量仅对线性辐射测量而不是几何失真具有健壮性,因此仅在视点发生微小变化时可用。
在找到对应关系之后,我们最终得到了一组源和目标坐标,它们可以用来估计两个图像之间的几何变换。然而,许多对应是错误的,简单地估计所有坐标的参数集是不够的。因此,RANSAC算法被用在正常模型之上,通过检测孤立点来稳健地估计参数集。
输出:
Ground truth:
Scale: (0.9000, 0.9000), Translation: (-10.0000, 20.0000), Rotation: -0.2000
Affine transform:
Scale: (0.9015, 0.8913), Translation: (-9.3136, 14.9768), Rotation: -0.1678
RANSAC:
Scale: (0.8999, 0.9001), Translation: (-10.0005, 19.9744), Rotation: -0.1999
import numpy as np
from matplotlib import pyplot as plt
from skimage import data
from skimage.util import img_as_float
from skimage.feature import (corner_harris, corner_subpix, corner_peaks,
plot_matches)
from skimage.transform import warp, AffineTransform
from skimage.exposure import rescale_intensity
from skimage.color import rgb2gray
from skimage.measure import ransac
# generate synthetic checkerboard image and add gradient for the later matching
checkerboard = img_as_float(data.checkerboard())
img_orig = np.zeros(list(checkerboard.shape) + [3])
img_orig[..., 0] = checkerboard
gradient_r, gradient_c = (np.mgrid[0:img_orig.shape[0],
0:img_orig.shape[1]]
/ float(img_orig.shape[0]))
img_orig[..., 1] = gradient_r
img_orig[..., 2] = gradient_c
img_orig = rescale_intensity(img_orig)
img_orig_gray = rgb2gray(img_orig)
# warp synthetic image
tform = AffineTransform(scale=(0.9, 0.9), rotation=0.2, translation=(20, -10))
img_warped = warp(img_orig, tform.inverse, output_shape=(200, 200))
img_warped_gray = rgb2gray(img_warped)
# extract corners using Harris' corner measure
coords_orig = corner_peaks(corner_harris(img_orig_gray), threshold_rel=0.001,
min_distance=5)
coords_warped = corner_peaks(corner_harris(img_warped_gray),
threshold_rel=0.001, min_distance=5)
# determine sub-pixel corner position
coords_orig_subpix = corner_subpix(img_orig_gray, coords_orig, window_size=9)
coords_warped_subpix = corner_subpix(img_warped_gray, coords_warped,
window_size=9)
def gaussian_weights(window_ext, sigma=1):
y, x = np.mgrid[-window_ext:window_ext+1, -window_ext:window_ext+1]
g = np.zeros(y.shape, dtype=np.double)
g[:] = np.exp(-0.5 * (x**2 / sigma**2 + y**2 / sigma**2))
g /= 2 * np.pi * sigma * sigma
return g
def match_corner(coord, window_ext=5):
r, c = np.round(coord).astype(np.intp)
window_orig = img_orig[r-window_ext:r+window_ext+1,
c-window_ext:c+window_ext+1, :]
# weight pixels depending on distance to center pixel
weights = gaussian_weights(window_ext, 3)
weights = np.dstack((weights, weights, weights))
# compute sum of squared differences to all corners in warped image
SSDs = []
for cr, cc in coords_warped:
window_warped = img_warped[cr-window_ext:cr+window_ext+1,
cc-window_ext:cc+window_ext+1, :]
SSD = np.sum(weights * (window_orig - window_warped)**2)
SSDs.append(SSD)
# use corner with minimum SSD as correspondence
min_idx = np.argmin(SSDs)
return coords_warped_subpix[min_idx]
# find correspondences using simple weighted sum of squared differences
src = []
dst = []
for coord in coords_orig_subpix:
src.append(coord)
dst.append(match_corner(coord))
src = np.array(src)
dst = np.array(dst)
# estimate affine transform model using all coordinates
model = AffineTransform()
model.estimate(src, dst)
# robustly estimate affine transform model with RANSAC
model_robust, inliers = ransac((src, dst), AffineTransform, min_samples=3,
residual_threshold=2, max_trials=100)
outliers = inliers == False
# compare "true" and estimated transform parameters
print("Ground truth:")
print(f"Scale: ({tform.scale[1]:.4f}, {tform.scale[0]:.4f}), "
f"Translation: ({tform.translation[1]:.4f}, "
f"{tform.translation[0]:.4f}), "
f"Rotation: {-tform.rotation:.4f}")
print("Affine transform:")
print(f"Scale: ({model.scale[0]:.4f}, {model.scale[1]:.4f}), "
f"Translation: ({model.translation[0]:.4f}, "
f"{model.translation[1]:.4f}), "
f"Rotation: {model.rotation:.4f}")
print("RANSAC:")
print(f"Scale: ({model_robust.scale[0]:.4f}, {model_robust.scale[1]:.4f}), "
f"Translation: ({model_robust.translation[0]:.4f}, "
f"{model_robust.translation[1]:.4f}), "
f"Rotation: {model_robust.rotation:.4f}")
# visualize correspondence
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
inlier_idxs = np.nonzero(inliers)[0]
plot_matches(ax[0], img_orig_gray, img_warped_gray, src, dst,
np.column_stack((inlier_idxs, inlier_idxs)), matches_color='b')
ax[0].axis('off')
ax[0].set_title('Correct correspondences')
outlier_idxs = np.nonzero(outliers)[0]
plot_matches(ax[1], img_orig_gray, img_warped_gray, src, dst,
np.column_stack((outlier_idxs, outlier_idxs)), matches_color='r')
ax[1].axis('off')
ax[1].set_title('Faulty correspondences')
plt.show()
脚本的总运行时间: (0分0.279秒)