 Source
Source备注
单击 here 下载完整的示例代码或通过活页夹在浏览器中运行此示例
形状指数¶
形状指数是局部曲率的单值度量,由Koenderink和van Doorn定义的黑森特征值得出 1.
它可以用来根据结构的外观局部形状来查找结构。
形状索引映射到从-1到1的值,表示不同类型的形状(有关详细信息,请参阅文档)。
在本例中,生成了一个带有斑点的随机图像,应该对其进行检测。
形状指数为1表示“球帽”,即我们要检测的斑点的形状。
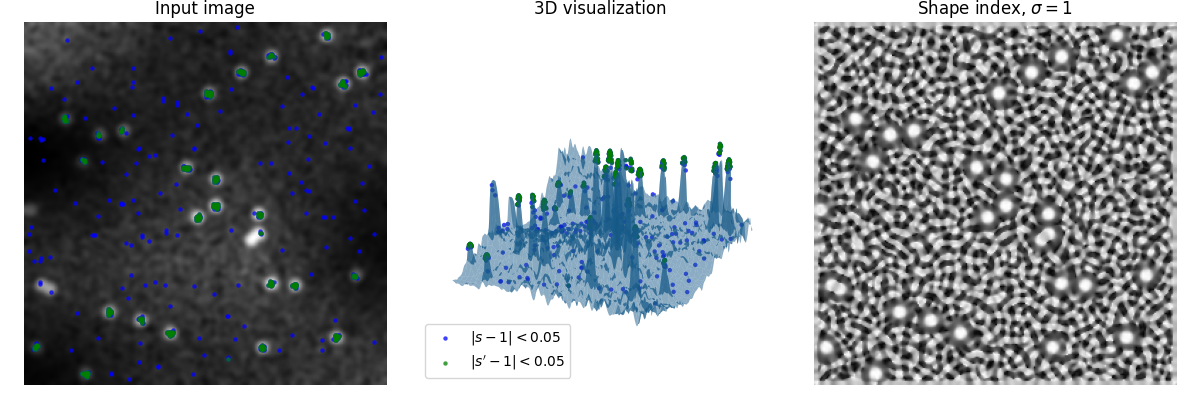
最左边的图显示生成的图像,中间的图显示图像的3D渲染,将强度值作为3D表面的高度,右边的图显示形状指数。
可见,形状指数也容易放大噪声的局部形状,但不受全局现象(例如,照明不均匀)的影响。
蓝色和绿色标记是与所需形状偏差不超过0.05的点。为了减弱信号中的噪声,在另一次高斯模糊传递(产生s‘)之后,从形状指数(S)中取出绿色标记。
注意相互连接得太近的点是如何 not 检测到,因为它们不具有所需的形状。
- 1
张晓明,“曲面形状与曲率尺度”,图像与视觉计算,1992,10,557-564。 DOI:10.1016/0262-8856(92)90076-F
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from scipy import ndimage as ndi
from skimage.feature import shape_index
from skimage.draw import disk
def create_test_image(
image_size=256, spot_count=30, spot_radius=5, cloud_noise_size=4):
"""
Generate a test image with random noise, uneven illumination and spots.
"""
state = np.random.get_state()
np.random.seed(314159265) # some digits of pi
image = np.random.normal(
loc=0.25,
scale=0.25,
size=(image_size, image_size)
)
for _ in range(spot_count):
rr, cc = disk(
(np.random.randint(image.shape[0]),
np.random.randint(image.shape[1])),
spot_radius,
shape=image.shape
)
image[rr, cc] = 1
image *= np.random.normal(loc=1.0, scale=0.1, size=image.shape)
image *= ndi.zoom(
np.random.normal(
loc=1.0,
scale=0.5,
size=(cloud_noise_size, cloud_noise_size)
),
image_size / cloud_noise_size
)
np.random.set_state(state)
return ndi.gaussian_filter(image, sigma=2.0)
# First create the test image and its shape index
image = create_test_image()
s = shape_index(image)
# In this example we want to detect 'spherical caps',
# so we threshold the shape index map to
# find points which are 'spherical caps' (~1)
target = 1
delta = 0.05
point_y, point_x = np.where(np.abs(s - target) < delta)
point_z = image[point_y, point_x]
# The shape index map relentlessly produces the shape, even that of noise.
# In order to reduce the impact of noise, we apply a Gaussian filter to it,
# and show the results once in
s_smooth = ndi.gaussian_filter(s, sigma=0.5)
point_y_s, point_x_s = np.where(np.abs(s_smooth - target) < delta)
point_z_s = image[point_y_s, point_x_s]
fig = plt.figure(figsize=(12, 4))
ax1 = fig.add_subplot(1, 3, 1)
ax1.imshow(image, cmap=plt.cm.gray)
ax1.axis('off')
ax1.set_title('Input image')
scatter_settings = dict(alpha=0.75, s=10, linewidths=0)
ax1.scatter(point_x, point_y, color='blue', **scatter_settings)
ax1.scatter(point_x_s, point_y_s, color='green', **scatter_settings)
ax2 = fig.add_subplot(1, 3, 2, projection='3d', sharex=ax1, sharey=ax1)
x, y = np.meshgrid(
np.arange(0, image.shape[0], 1),
np.arange(0, image.shape[1], 1)
)
ax2.plot_surface(x, y, image, linewidth=0, alpha=0.5)
ax2.scatter(
point_x,
point_y,
point_z,
color='blue',
label='$|s - 1|<0.05$',
**scatter_settings
)
ax2.scatter(
point_x_s,
point_y_s,
point_z_s,
color='green',
label='$|s\' - 1|<0.05$',
**scatter_settings
)
ax2.legend(loc='lower left')
ax2.axis('off')
ax2.set_title('3D visualization')
ax3 = fig.add_subplot(1, 3, 3, sharex=ax1, sharey=ax1)
ax3.imshow(s, cmap=plt.cm.gray)
ax3.axis('off')
ax3.set_title(r'Shape index, $\sigma=1$')
fig.tight_layout()
plt.show()
脚本的总运行时间: (0分0.324秒)