 Source
Source备注
单击 here 下载完整的示例代码或通过活页夹在浏览器中运行此示例
简要二进制描述符¶
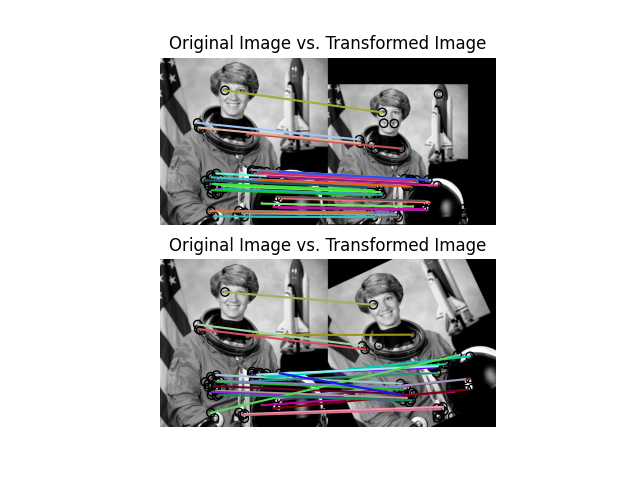
此示例演示了简要的二进制描述算法。描述符由相对较少的比特组成,并且可以使用一组强度差异测试来计算。较短的二进制描述符导致较低的存储器占用量和基于汉明距离度量的非常高效的匹配。Brief不提供旋转不变性。通过检测和提取不同尺度上的特征,可以实现尺度不变性。
from skimage import data
from skimage import transform
from skimage.feature import (match_descriptors, corner_peaks, corner_harris,
plot_matches, BRIEF)
from skimage.color import rgb2gray
import matplotlib.pyplot as plt
img1 = rgb2gray(data.astronaut())
tform = transform.AffineTransform(scale=(1.2, 1.2), translation=(0, -100))
img2 = transform.warp(img1, tform)
img3 = transform.rotate(img1, 25)
keypoints1 = corner_peaks(corner_harris(img1), min_distance=5,
threshold_rel=0.1)
keypoints2 = corner_peaks(corner_harris(img2), min_distance=5,
threshold_rel=0.1)
keypoints3 = corner_peaks(corner_harris(img3), min_distance=5,
threshold_rel=0.1)
extractor = BRIEF()
extractor.extract(img1, keypoints1)
keypoints1 = keypoints1[extractor.mask]
descriptors1 = extractor.descriptors
extractor.extract(img2, keypoints2)
keypoints2 = keypoints2[extractor.mask]
descriptors2 = extractor.descriptors
extractor.extract(img3, keypoints3)
keypoints3 = keypoints3[extractor.mask]
descriptors3 = extractor.descriptors
matches12 = match_descriptors(descriptors1, descriptors2, cross_check=True)
matches13 = match_descriptors(descriptors1, descriptors3, cross_check=True)
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
plot_matches(ax[0], img1, img2, keypoints1, keypoints2, matches12)
ax[0].axis('off')
ax[0].set_title("Original Image vs. Transformed Image")
plot_matches(ax[1], img1, img3, keypoints1, keypoints3, matches13)
ax[1].axis('off')
ax[1].set_title("Original Image vs. Transformed Image")
plt.show()
脚本的总运行时间: (0分0.302秒)