案例展示¶
本页面展示了Pymunk的一些使用方式。我希望你和我一样发现它们鼓舞人心!
这并不是用Pymunk制作的所有作品的完整列表,只是我在网上找到的一些作品。如果您也使用Pymunk做过一些事情,请告诉我,我可以在这里添加!
游戏¶
Python中的Suika¶
made by Ole-Batting. Retrieved 2024-08-18

重新实施 Suika Game 在Python / Pymunk中。将水果混合制成更大的水果。请务必不要错过第二部分,Ole-Batting为游戏添加适当的精灵!对 YouTube .第1部分和第2部分的源代码 Github .
PyKart -制造和驾驶您的车辆¶
made by Valdotorium. Retrieved 2024-08-18
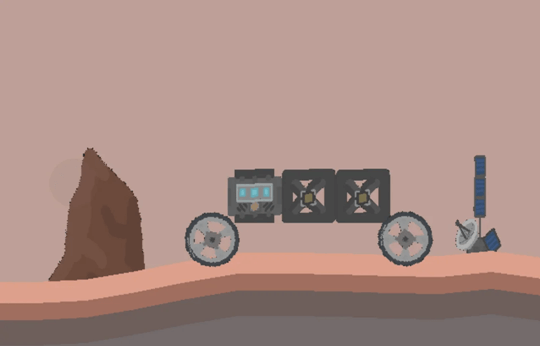
一款驾驶游戏,玩家可以在物理生成的景观中驾驶他们建造的车辆!这款游戏既可以下载,也可以作为网络版本,可直接在浏览器中玩,并在GitHub上提供完整的源代码。
引导球¶
made by Francis Ali. Retrieved 2020-03-30
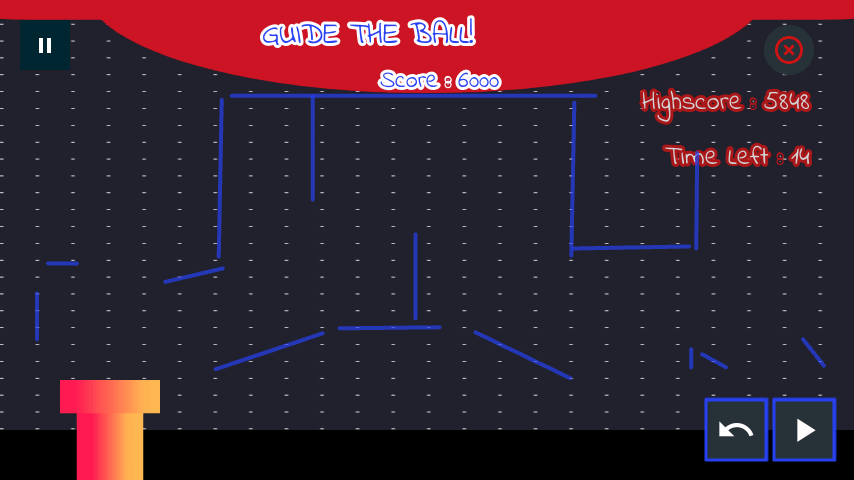
一款结合Pymunk和Kivy的游戏,在Android手机上运行!在《引导球》中,任务是引导球通过19个激动人心且具有挑战性的关卡!
我最诚挚的歉意¶
made by The Larry and Dan show (mauve, larry). Retrieved 2018-10-25

Winner of PyWeek 24 (整体参赛队伍)
一个有趣的游戏,射击,和“很抱歉让你经历这样的事情”。
火星上的一个制造机器人应该制造一堆机器人!但它变得懒惰并制造了可以制造其他机器人的机器人。这让他们比他们应该变得更聪明。现在他们都消失了,躲在各种坦克和电脑后面。令人高兴的是,他知道如何建造 you ,一个简单的战斗机器人。清理每个区域是你的工作!
请看丹尼尔·波佩斯的拆毁 here 有关更多详细信息
冰下¶
made by Team Chimera (mit-mit, Lucid Design Ar). Retrieved 2016-09-25
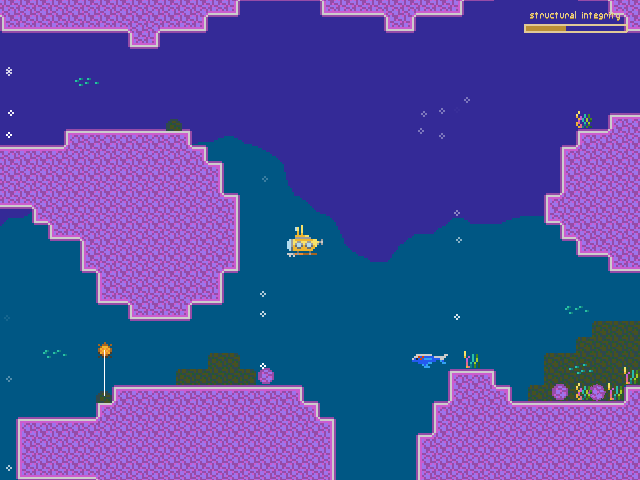
Winner of PyWeek 22 (整体参赛队伍)
冰下是一款潜水艇探险游戏和解谜冒险!揭开一个神秘的贱民,他不能让你发现他的秘密,谁不能让你进入!奇美拉队拿下3分!
别针¶
made by Tee. Retrieved 2016-01-25
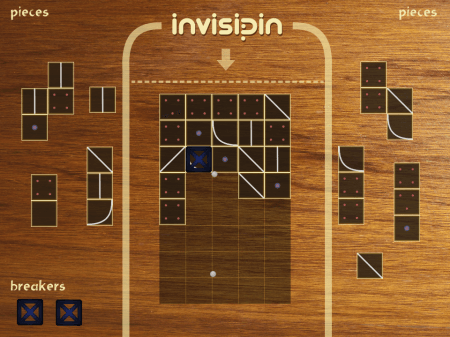
Winner of PyWeek 20 (整体个人参赛作品)
一款类似弹球哥的益智游戏。打一些球并仔细观察它们的运动(即收集数据)以重建棋盘!
Python中的愤怒的小鸟¶
made by Estevao Fonseca. Retrieved 2016-10-30

使用Pygame和Pymunk用Python编写的愤怒的小鸟游戏!
SubTerrex¶
made by Paul Paterson. Retrieved 2016-01-25

一款洞穴探险游戏,你可以通过绳索进入洞穴来探索洞穴。
非游戏¶
自动冰导航¶
made by de Schaetzen, Rodrigue and Botros, Alexander and Zhong, Ninghan and Murrant, Kevin and Gash. Retrieved 2024-11-27
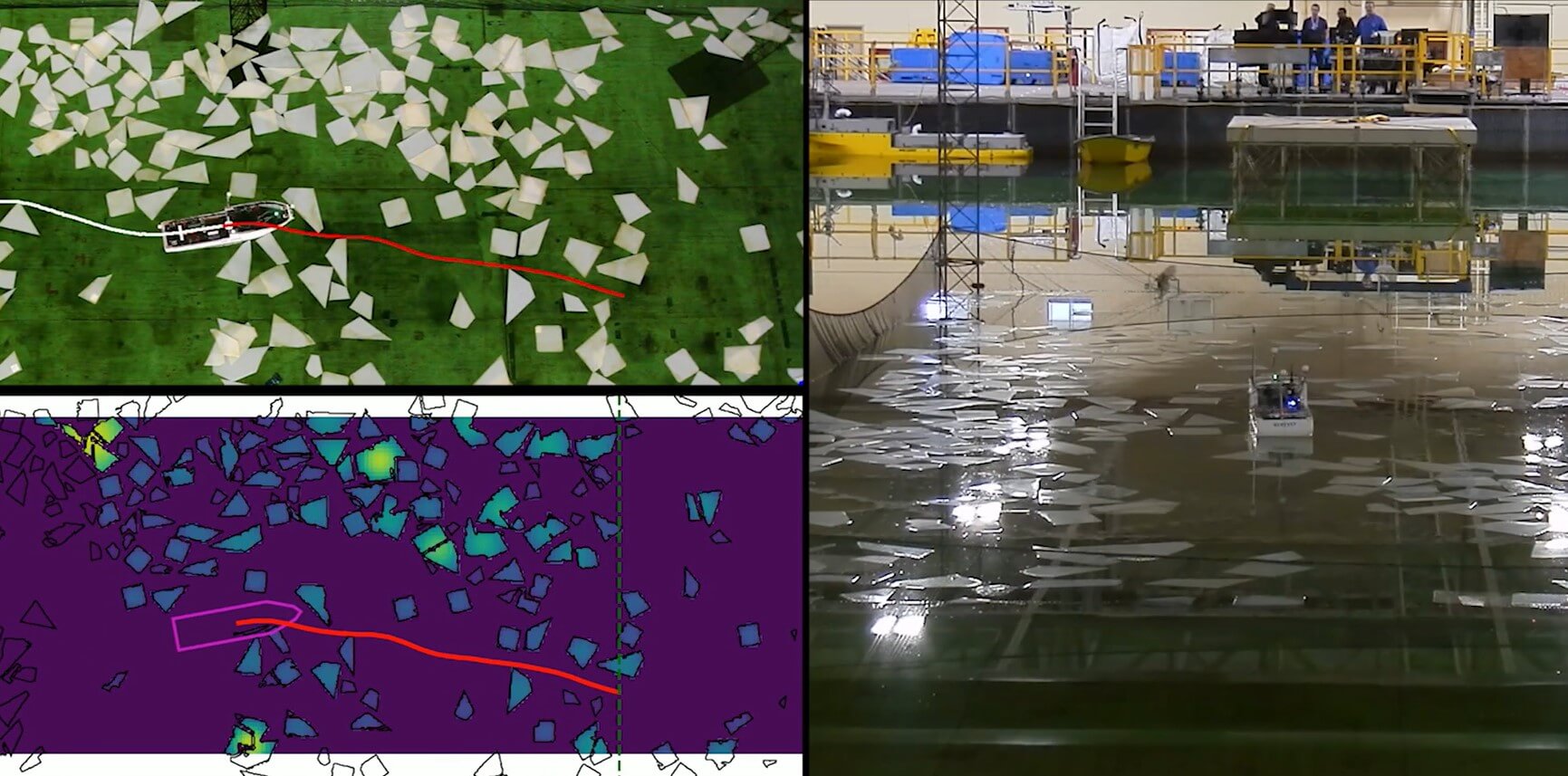
结冰条件通常要求船只降低速度并偏离主要航线,以避免对船只造成损坏。此外,破碎的冰盖正在成为北极遇到的主要冰况,与冰碰撞的影响高度取决于接触发生的地点和浮冰的特定特征。Auto-IceNav是一个用于在浮冰区作业的船舶自主导航的框架。
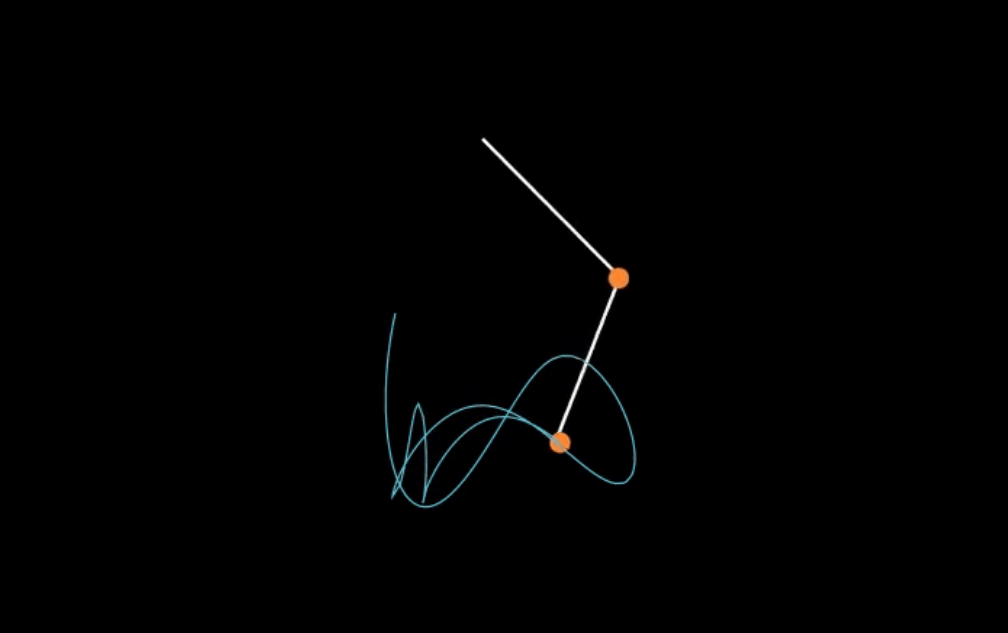
弹跳球,美丽的图案¶
made by Alessandro Giusti. Retrieved 2022-01-25

令人满意的弹跳球符合物理定律的模拟;在模拟过程中的短暂时刻,球通过美丽的规则排列。
通过连接两个模拟来获得每个序列,这两个模拟都是从球规则排列的时间开始的。一个是在时间上向前模拟,一个是向后模拟。
马尼姆物理学¶
made by pdcxs, Matheart & Iced-Tea3. Retrieved 2021-07-05
这是一个2D物理模拟插件, Manim 这使您能够在物理学的各个分支中生成复杂的场景,例如刚性力学、电磁学、波动等。
计算机视觉和物理学¶
made by Amirabbas Asadi. Retrieved 2021-06-25

只需玩OpenCV+手部跟踪模型+物理引擎:)
一篇非常酷的博客文章(和视频)解释了如何将计算机视觉和一点物理结合起来为增强现实创建一个简单的环境。Amirabbas Asadi在博客中展示了OpenCV、Mediapipe和Pymunk如何结合起来制作一个应用程序,模拟球可以在用户手上弹跳。
Galton板¶
made by Nav. Retrieved 2021-05-17
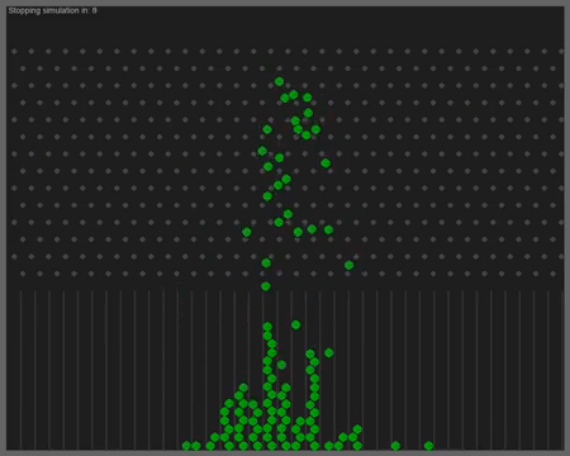
在Pymunk创造的五角形(也被称为高尔顿板)。
这是Galton Board模拟程序,可在三种模式下运行,包括中等大小的球、小球和大球。必须在球的弹性和初始化位置中添加一些随机性,以帮助与物体进行适当的互动。
PySimpleUI桌面演示¶
made by PySimpleGUI/Mike. Retrieved 2020-10-13

演示了如何结合使用PySimpleGUI和Pymunk在桌面上直接创建弹跳球,这要归功于透明的容器窗口。
使用差异进化和感知的腿机器人¶
made by Nav. Retrieved 2020-08-20
腿机器人首先使用差异进化来导航地形,然后学习通过其感官的感知来识别世界。
环境钟声模拟|六边形中的圆¶
made by Jan Abraham.Retrieved 2019-11-17
通过模拟弹跳球产生的环境钢琴和弦。计算是使用Pymunk库进行的。调音:金伯格三世
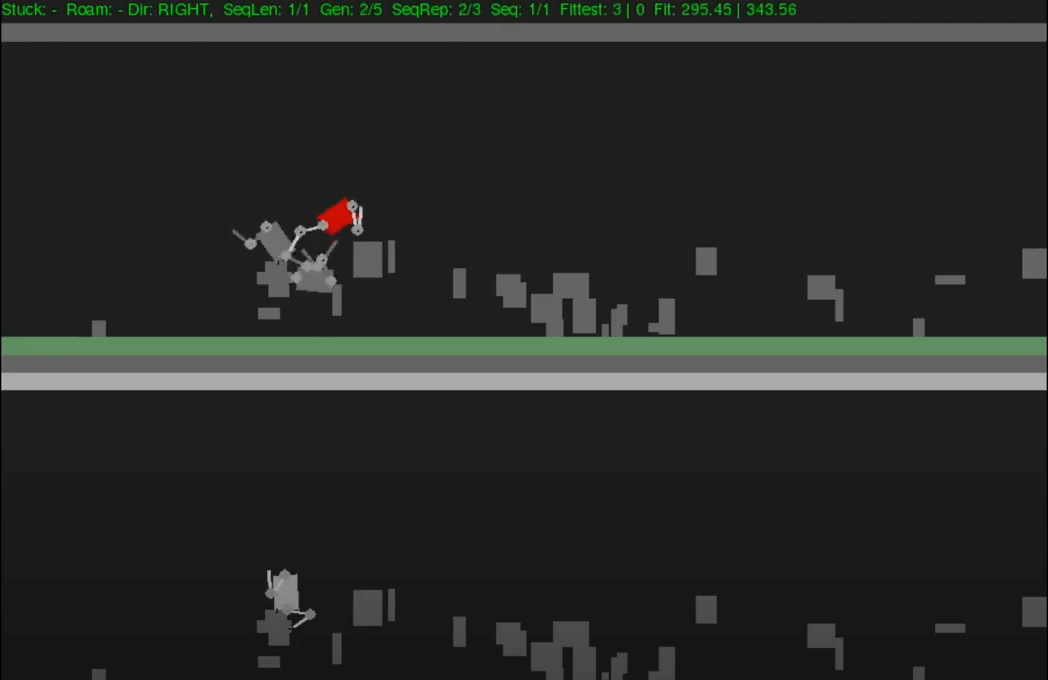
我教人工智能使用NEAT移动¶
made by Cheesy AI. Retrieved 2019-11-17
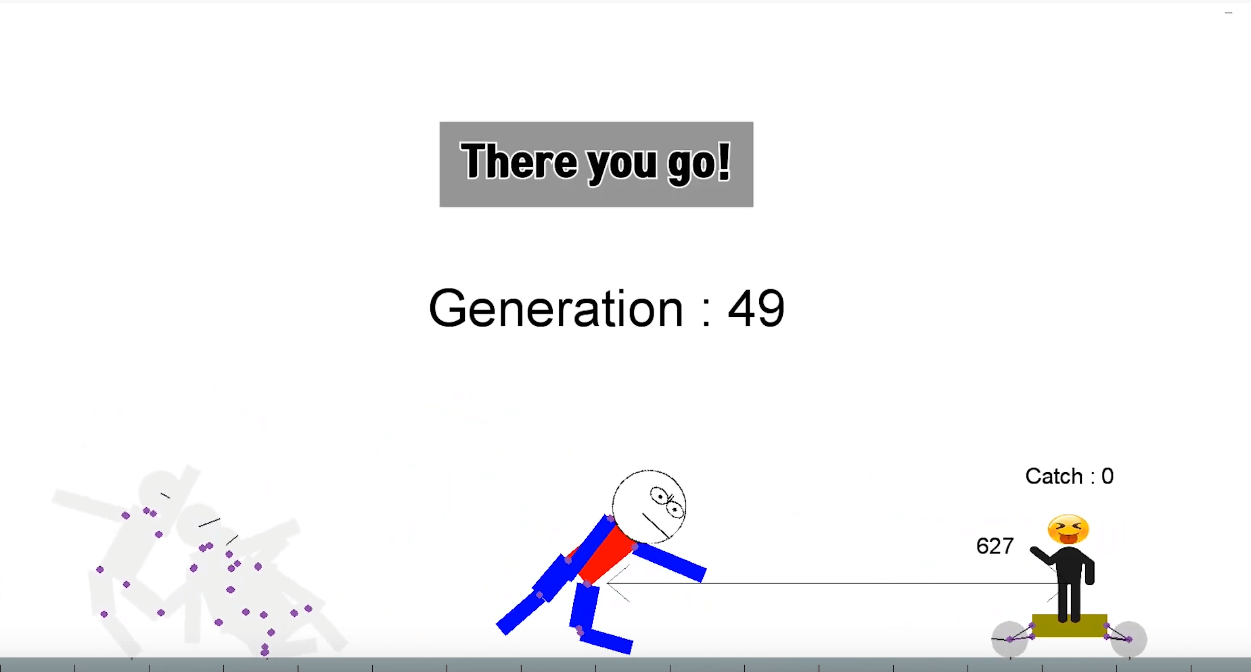
最近我学习了Pymunk二维物理库。这是非常酷的,所以我为我的人工智能制作了2维人形。今天,我要教会人工智能如何用整洁向前迈进。Neat是一种用于生成进化人工神经网络的遗传算法。结果很奇怪,但会很有趣的。玩得开心!
差异化进化的汽车配置¶
made by Nav. Retrieved 2019-05-05
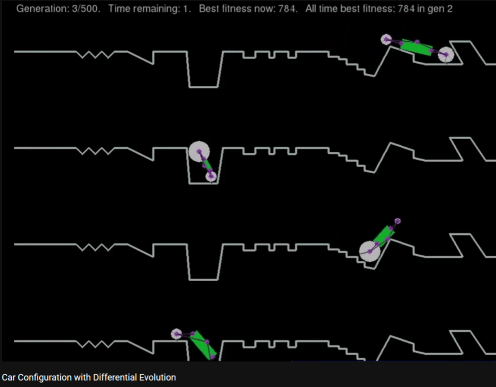
在最简单的人工智能算法中:差异进化。与Pymunk和皮格里克一起被赋予生命。每节赛车都有到达赛道终点的目标,但只有15秒的时间。他们探索了车辆速度、底盘宽度、底盘高度和车轮半径的多维搜索空间,以找到各种配置,其中很少有配置能成功帮助汽车通过赛道。
源代码可在GitHub https://github.com/nav9/evolutionaryCarRace上获取
VirtuaPlant¶
made by Jan Seidl. Retrieved 2018-06-13
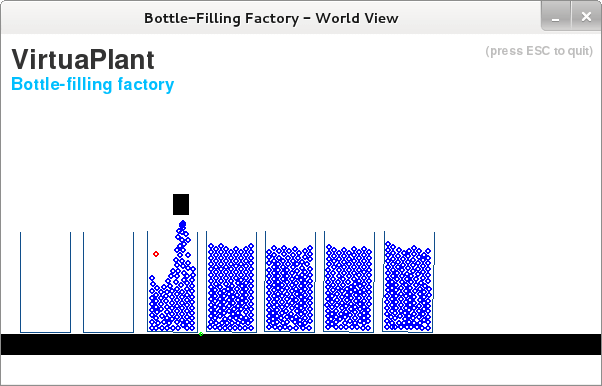
VirtuaPlant是一款工业控制系统模拟器,它在大多数PLC模拟器的基本“读/写标签”功能中添加了“类似于现实世界的控制逻辑”。VirtuaPlant与游戏库和2D物理引擎配对,能够呈现模拟控制系统背后的“世界观”的图形用户界面,使用户能够了解控制系统背后的潜在操作。
Python街机库¶
made by Paul. Retrieved 2018-03-05
Arcade是一个易于学习的Python库,用于创建2D视频游戏。它不直接与Pymunk相关,但包括许多示例和助手类,以使用Arcade应用程序中的Pymunk物理学。
billiARds -增强现实池游戏¶
made by Alex Baikovitz. Retrieved 2017-05-21

亚历克斯为他在卡内基梅隆大学的15-112(编程和计算机科学基础)学期项目建造了台球。使用OpenCV、PyGame和Pymunk在Python3中制造。用户只需使用台球杆,就可以在任何普通的表面上运行该程序。
pyPhysics沙箱¶
made by Jay Shaffstall. Retrieved 2017-01-01
PyPhysicsSandbox是一个围绕Pymunk的简单包装器,它使得编写代码来探索2D物理模拟变得很容易。它的目标是在初级编程教室中使用。
卡罗姆模拟¶
made by Samiran Roy. Retrieved 2016-10-27
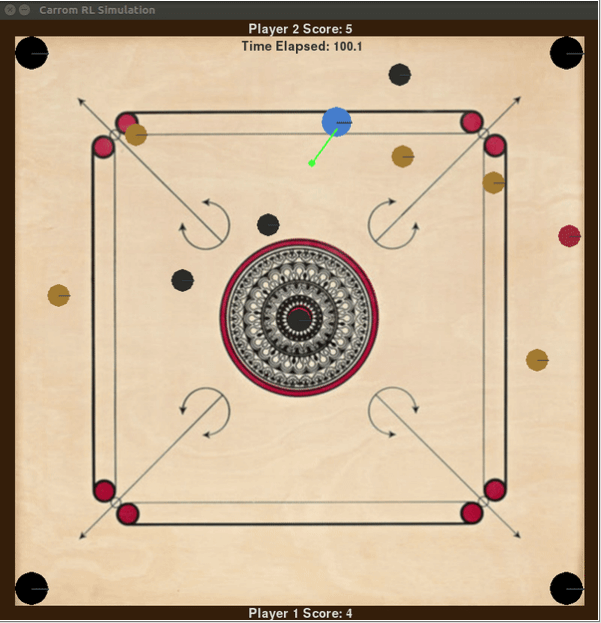
一个开源Carrom模拟器界面,用于测试智能/学习代理。它提供了一个界面,允许您设计播放Carrom的代理。它是在Python中构建的,使用Pygame + Pymunk。这是CS 747 -智能和学习代理基础的课程项目,由印度理工学院孟买分校的Shivaram Kalyanakrishnan教授任教。
自动驾驶汽车¶
made by Matt Harvey. Retrieved 2016-08-07
这个项目训练虚拟汽车如何使用一种名为Q-Learning的强化学习来在屏幕上移动物体(自动驾驶),而不会遇到障碍物。
论文/科学¶
Pymunk已经在许多科学论文中被使用或提及。
曾使用或提到Pymunk的论文列表:
刘,李,张强红,李梦子,李瑞通,何志明,Arnaud Dechesne,Barth F.苏梅茨和盛国萍。“单细胞分析表明,抗生素通过调节细菌生长而不是结合效率来影响结合转移。“环境国际(2025):109385。
戴维森、安德鲁。“使用Pymunk模拟机械曲线绘制。”(2025年)。
Liu、Daochang、Junyu Zhang、Anh-Dung Dinh、Eunbyung Park、Shichao Zhang和Chang Xu。“视觉中的生成物理人工智能:一项调查。”arXiv预印本arXiv:2501.10928(2025)。
Liu,Shaowei,Zhongzheng Ren,Saurabh Gupta和Shenlong Wang.“Physgen:刚体物理基础的图像到视频生成。”在欧洲计算机视觉会议上,pp。360-378. 2025年,查姆,斯普林格。
顾、飞达、桑红瑞、周艳敏、马佳军、江戎、王志鹏和何斌。“使用交互效应传播来学习可变形线性对象形状控制的图形动力学。“IEEE自动化科学与工程汇刊(2025年)。
Zhong、Ninghan、Alessandro Potenza和Stephen L.史密斯“在冰层覆盖的水域中进行自主导航,并对船冰相互作用进行了学习预测。”arXiv预印本arXiv:2409.11326(2024)。
Shen、Kei、Yangwei、Zhang Huan和Liun Zhu。“BaB-ND:具有分支绑定和神经动力学的长视野运动规划。“在第二届CoRL关于学习有效的规划抽象研讨会上。
Parashar、Anjali、Kunal Garg、Joseph Zhang和Chuchu Fan。“来自少数专家演示的失败预测。“在NeurIPS 2024年关于Bayesian决策和不确定性的研讨会上。
Parashar、Anjali、Kunal Garg、Joseph Zhang和Chuchu Fan。“来自有限硬件演示的故障预测。”arXiv预印本arXiv:2410.09249(2024)。
Bunn,Tristan,Craig Anslow,and Karsten Lundqvist.“Towards a Python 3 processing IDE for teaching creative programming.多媒体工具和应用(2024):1-14。
卡萨布兰卡、埃内斯托、张增杰、格雷戈里奥·马切西尼、索菲·海萨尔特、迪莫斯·V·迪马罗戈纳斯和萨迪格·苏贾尼。“SymAware:具有情境感知的值得信赖的多代理系统的软件开发框架。”arXiv预印本arXiv:2409.14833(2024)。
哦,内廷、郑文庆和朴大贤。“DiSPo:基于扩散-RSM的政策学习,用于从粗到细的行动离散化。”arXiv预印本arXiv:2409.14719(2024)。
科热夫尼科夫,弗吉尼亚州,和VI伦尼-利哈切夫斯基。“模拟高尔顿的棋盘实验。“ISJ理论与应用科学,07(135)(2024):14-22。
巴托克、罗兰和贝尔塔兰·托罗尼亚。“基于LOS的模糊行为描述语言(FBDL)的代理模拟器。“2024年第25届国际喀尔巴鄂控制会议(ICCC),pp. 01-06. IEEE,2024。
施瓦茨、乔纳森、里斯·纽伯里、达纳·库利奇和汉娜·库尔尼亚瓦蒂。“POSGGym:部分可观察的多智能体环境中决策理论规划和学习的图书馆。”(2024年)。
艾、波、田浩晨、石宜轩、王宜轩、陈士东、李云珠和吴佳军。“RoboPack:学习密集包装的触觉动力学模型。“参加ICRA 2024年机器人操纵的3D视觉表示研讨会。
巴拉班、海莉和托默·乌尔曼。“想象中跟踪的能力限制。”(2024年)。
Memery、Sean、Mirela Lapata和Kartic Subr。“SimLM:语言模型可以推断物理系统的参数吗?”arXiv预印本arXiv:2312.14215(2023)。
Wu、Tailin、Takashi Maruyama、Long Wei、Tao Zhang、Yilun Du、Gianluca Iaccarino和Jure Leskovec。“成分生成反向设计。”arXiv预印本arXiv:2401.13171(2024)。
埃尔南德斯·卡诺、莱昂纳多。“使用源代码来解决控制问题。“博士学位,麻省理工学院,2024年。
Pan,Hainan,Chen Bailiang,Huang Kaihong Huang,Junkai Ren,Chuang Cheng,Huimin Lu,and Hui Zhang.“基于深度强化学习的跟踪机器人鳍片控制方法。“系统模拟杂志36,第2期(2024年):405。
Liu、Ziang、Zhengeng Zhou、Jeff He、Tobia Marcucci、Lee Fei-Fei、Wu Jiajun和Lee Yunzhu。“具有稀疏神经动力学的基于模型的控制。”arXiv预印本arXiv:2312.12791(2023)。
袁、建雅、韩梦雪、王洪建、博中、高伟和丹宇。“基于深度确定性政策梯度的AMV避碰规划方法。“海洋科学与工程杂志11,第12期(2023):2258。
雷纳,卢卡。“用于杂波中基于2D物理的对象操纵的深度强化学习。”arXiv预印本arXiv:2312.04570(2023)。
索萨,菲利克斯A.,塞缪尔·J·格什曼和托默·D。乌尔曼。“混合模拟和抽象进行物理推理。“认知254(2025):105995..
李世谦、吴克文、张驰、朱一新。“i-phyre:交互式物理推理。”Arxiv预印本arxiv:2312.03009(2023年)。
奥马尔·奥利瓦,爱德华。“不同的是,我建造了机器人Autónom Per Jugaral Billar。”加泰罗尼亚理工大学硕士论文,2023年。
潘,海南,陈协远,任俊凯,陈百亮,黄开红,张慧,卢惠民。城市救援环境中履带式机器人Pymunk控制的深度强化学习遥感15,第18期(2023):4616.
杨宇龙,曹卫华,郭林伟,赵干,吴敏。“稀疏奖励场景下的奖励整形强化学习和混合探索。”2023年IEEE第六届国际工业网络物理系统会议(ICPS),第1-6页。IEEE,2023年。
黄泽南、王浩波、赵俊波和能干郑。“从多视图时间序列中识别潜在过程。”Arxiv预印本arxiv:2305.08164(2023年)。
德·谢岑、罗德里格、亚历山大·博特罗斯、罗伯特·加什、凯文·穆兰特和斯蒂芬·L·史密斯。“冰封水域自主水面车辆的实时导航”Arxiv预印本arxiv:2302.11601(2023年)。
Ansari、Abdul Fatir、Alvin Heng、Andre Lim和Harold Soh。“非规则抽样时间序列的神经连续-离散状态空间模型。”Arxiv预印本arxiv:2301.11308(2023年)。
Ige,Ifeoluwatayo A.和Bolanle F.Oladejo。“Text2Simulate:一种用于从文本知识生成可视化模拟的科学知识可视化技术。”《国际高级计算机科学与应用杂志》第14期,第2期(2023)。
亚历克斯,珍妮,杰森·斯蒂勒曼,诺亚·弗里茨汉德和塔克·帕隆。“紧急情况下基于主体的人群动力学模型:关注残疾人。”Arxiv预印本arxiv:2212.08149(2022年)。
Schöttle、Marius、Tobias Lauster、Lukas J.Roemling、Nicolas Vogel和Markus Retsch。“一种连续的梯度胶体玻璃。”先进材料(2022年):2208745。
黄冰玲和严瑾。“在装配任务中的自组织系统的多智能体强化学习中的奖励成形。”《高等工程信息学》54(2022年):101800。
刘露西,加里·崔和L.Mahadean。“准晶体基里加米。”《物理评论研究》,第4期(第3期),033114,2022年。
沈从文、杰里米、肖尔栋、刘宇晨和陈锋。一个用于粒子机器人导航和对象操纵的深度强化学习环境。Arxiv预印本arxiv:2203.06464(2022年)。
洛佩兹,埃斯特班·费尔南多。“软机器人控制和湍流模型的数据驱动方法。”伊利诺伊理工学院博士学位,2022年。
作者声明:Sadhukhan,Priyam,和Rastko R.Selic。“编队导航和避障的最新政策优化。”《国际智能机器人与应用杂志》(2022):1-14。
林克、马丁、马克斯·施瓦茨和斯文·本克。“从视频预测物理对象属性。”Arxiv预印本arxiv:2206.00930(2022年)。
哈哈,本杰明·詹姆斯。《商品架构中的侧通道安全风险》VU研究门户网站。(2022年)。
欧塔,约瑟夫,xi,贾周,孝旺,和托拜厄斯·格斯滕伯格。停,孩子们,那是什么声音?通过心理模拟进行的多模式推理。您的位置:我也是知道的。5月13日(2022年)。
埃南德,乔纳斯医学博士,杰拉尔德·E·勒布和亨里克·乔恩特尔。“感觉运动功能的自组织模型:脊髓神经元间整合。”《神经生理学杂志》(2022)
阿比·哈米德、穆斯托法、迪马斯·阿迪塔马、恩迪·佩尔马塔、努尔·霍利法、穆罕默德·努尔坦托和努尔·瓦希德·阿卜杜勒·马吉德。“用Python语言编程模拟新冠肺炎疫情事件及其防范措施。”《印度尼西亚电气工程与计算机科学杂志》第26期,第1期(2022):278-288。
塞马奇、佛迪卡·拉克纳特、汤曼·乔治·卡林帕纳尔、桑图·拉纳和斯韦塔·文卡特什。“通用策略网络的快速基于模型的策略搜索。”Arxiv预印本arxiv:2202.05843(2022年)。
题名/责任者:The First,and Sbarna Chatterjee.“作为机器人运动规划的世界模型,记忆中的物理环境。”《软计算:理论与应用》,第559-569页。斯普林格,新加坡,2022年。
Gessow、Samuel、Sunay Bhat、Yi-Chun Hung和Vahe Gyuloglyan。《平行双车杆239AS项目报告S2021》
书名/作者The Sosa,Felix A.,Tomer Ullman,Joshua B.Tenenbaum,Samuel J.Gershman,和Tobias Gerstberg。“道德动力学:将道德判断建立在直觉物理学和直觉心理学的基础上。”《认知》第217期(2021年):104890。
哈尔多,乔戈斯,马克西米利安·诺卡和索梅纳特·巴克什。“使用人工训练数据准确分割细菌细胞。”BioRxiv(2021年)。
拜斯、伊洛娜、凯文·史密斯、伊丽莎白·博纳维茨和托默·乌尔曼。“高效的局部模拟定量地解释了与最佳物理预测的偏差。”
拜斯、伊洛娜、凯文·史密斯、伊丽莎白·博纳维茨和托默·乌尔曼。《部分心理模拟解释物理推理中的谬误》(2021)。
杨鲁杰、张开清、亚历山大·阿米斯、李云珠和拉斯·特德拉克。“部分可观测环境中的离散近似信息态。”
袁建亚,王宏建,张宏翰,林昌建,丹宇,李承峰。“基于深度强化学习的AUV避障规划。”《海洋科学与工程学报》第9卷第11期(2021):1166。
书名/作者声明:[by]A.Vivarum:计算生物学中综合多尺度建模的界面和引擎>(2021)。
书名/作者声明:[by]A.<隔膜辅助材料:计算生物学中综合多尺度模型的接口和引擎>(2021)。
埃南德、乔纳斯医学博士、杰拉尔德·E·勒布、亨里克·乔恩特尔、亚当·M·琼斯、马修·柯克兰和乔丹·赫利斯。“感觉运动功能的自组织模型:脊髓单突触环。”BioRxiv(2021年)。
书名/作者声明:[by]J.“大肠杆菌的全菌落模拟。”BioRxiv(2021年)。
扎卡、凯文、曾安迪、皮特·弗洛伦斯、乔纳森·汤普森、珍妮特·博格和黛比达塔·德维贝迪。“XIRL:交叉体现的逆强化学习。”Arxiv预印本arxiv:2106.03911(2021年)。
格斯滕伯格、托拜厄斯、马克斯·西格尔和约书亚·特南鲍姆。“发生了什么?通过视觉和声音重建过去。”(2021)。
德鲁西亚、马尔科、安妮塔·卡塔帕诺、马尔科·蒙泰穆罗和热罗姆·佩莱赫·S。软木团聚体中的预应力状态:压缩成型过程的模拟。《国际材料成形杂志》(2021):1-14。
塞马奇、佛迪卡·拉克纳特、汤曼·乔治·卡林帕纳尔、桑图·拉纳和斯韦塔·文卡特什。“直观物理引导探索,实现样本高效的Sim2Real传输。”Arxiv预印本arxiv:2104.08795(2021年)。
题名/责任者:The First,and Nishant Doshi.《计算机科学应用程序的最高级编程语言》(2021)。
书名/作者声明:by J.部分笼子:基于间隙的定义、数据集和深度学习。自主机器人(2021):1-18。
季浩和严瑾。“利用深度多智能体强化学习设计自组装系统。”
森广树、正田雅之和绪方哲也。“基于触觉的好奇心最大限度地提高了触觉丰富的面向对象的行为,即使没有任何外在奖励。”2020年IEEE第十届发展、学习和表观遗传机器人国际联合会议(ICDL-EpiRob),第1-7页。IEEE,2020。
姜林成。“一种基于日光时势和循环最短路径生成养老院单层平面图的计算方法”(2020)。
陈冠希、里奇·特Q、布兰登·阿莫斯和马西米利安·尼克。学习常微分方程式的神经事件函数。Arxiv预印本:arxiv:2011.03902(2020年)。
杰恩、阿尤什、安德鲁·索特和约瑟夫·J·林。“强化学习中新动作的泛化。”Arxiv预印本:arxiv:2011.01928(2020年)。
佩蒂吉拉德、朱利安、托尼·皮盖特、菲利普·鲍库尔、迪迪埃·查马涅、埃里克·福林和让-克里斯托夫·德尔马雷。“绕组磁头的稳态和二维热等效电路--一种新的建模方法。”数学与计算应用25,第4期(2020):70。
胡克、乔塞普、赛义夫·塞基、瓦鲁纳·德·席尔瓦和艾哈迈德·孔多兹。“在自主系统的多代理环境中学习数据驱动的决策策略。”认知系统研究65(2021):40-49。
题名/责任者:The First of First,and the First,and the First.《ATLAS纪事:故事驱动游戏程序化生成系统的开发与验证》
伊夫,纳文。“基于情境和事件的认知记忆结构适用于具身智能机器。”
伊夫,纳文。《作为机器人运动规划世界模型的记忆物理环境》(2020)。
李、云珠、安东尼奥·托拉尔巴、阿南德库马尔、迪特尔·福克斯和阿尼梅什·加格。从视频中发现物理系统中的因果关系。Arxiv预印本:arxiv:2007.00631(2020年)。
书名/作者声明:[by]A.“视觉前瞻的线性模型在物体堆积操作中的惊人效果。”Arxiv预印本:arxiv:2002.09093(2020年)。
沃斯,巴斯蒂安。《风帆拖船:风助拖带应用于提阿尔夫的可行性研究》(2019)。
Wong、Eric C.“基于范例的希伯来学习可能足以支持人类智力。”Bio Rxiv(2019年):758375。
马努里、亚历山大和塞德里克·布赫。使用内在动机的层次化非洲之舞发现>,2019年。
蒙西夫、迈赫迪、塞巴斯蒂安·莱昂、伯努瓦·苏伊洛和洛尼斯·阿杜安。“通用通知网络:可在代理之间转移的知识。”2019年第六届控制、决策和信息技术国际会议(CoDIT),第563-568页。IEEE,2019年。
杜、伊伦和卡尔西克·纳拉西姆汉。《深度强化学习的任务不可知性动力学基础》《国际机器学习会议》,1696-1705页。2019年。
西格尔,这是麦克斯·哈蒙。“感知和认知中的成分模拟。”麻省理工学院博士学位,2018年。
Caselle-Dupré,Hugo,Louis Annabi,Oksana Hgen,Michael Garcia-Ortiz和David Filliat。“平地:用于强化学习的轻量级第一人称2-D环境。”Arxiv预印本arxiv:1809.00510(2018年)。
迎珍、李和斯蒂芬·曼特。“解除纠缠的顺序自动编码器。”《国际机器学习会议》,第5656-5665页。2018年。
梅尔尼克,安德鲁。《人脑和认知结构中的感觉运动处理》(2018)。
李英珍和斯蒂芬·曼特。“序列数据解缠表示的深度生成模型。”Arxiv预印本arxiv:1803.02991(2018年)。
Hong suk Yi,Eunsoo Park和Seungil Kim(이홍석,박은수,和김승일.)“自动车辆驾驶的深度强化学习”(“자율주행자동차주행을위한심화강화학습.”)2017年韩国软件工程会议(한국정보과학회학술발표논문집(2017):784-786.)
弗拉卡罗、马尔科、西蒙·卡隆、乌尔里希·帕奎特和奥莱·温瑟。一种用于无监督学习的解缠识别和非线性动力学模型Arxiv预印本arxiv:1710.05741(2017年)。
Kister,Ulrike,Konstantin Klamka,Christian Tominski和Raimund Dachselt。GRAPH:将空间感知的移动设备与图形可视化和交互的显示墙相结合。“见《计算机图形论坛》,第36卷,第3期,第503-514页。2017年。
金,尼尔·H,格洛丽亚·李,尼古拉斯·A·谢勒,K·迈克尔·马蒂尼,奈杰尔·戈登菲尔德和托马斯·E·库尔曼。“单个活细胞中的实时转座子活性。”《美国国家科学院院刊》第113卷,第26期(2016):7278-7283。
作者声明:[by]Baketi、AShuosh和Arobinda Gupta;“使用移动无线传感器的非线性屏障覆盖。”《计算机与通信》(ISCC),2017年IEEE研讨会,第804-809页。IEEE,2017。
埃斯佩索、大卫·R、埃斯特班·马丁内斯-加西亚、维克托·德·洛伦佐和安格尔·戈尼-莫雷诺。“物理力量塑造了游动恶臭假单胞菌的群体特性。”微生物学前沿7(2016)。
戈尼-莫雷诺、安吉尔和马丁·阿莫斯。“DISCUS:一个共轭计算的仿真平台。”非常规计算和自然计算国际会议,第181-191页。施普林格国际出版社,2015年。
Amos,Martyn等人。“利用工程种群进行细菌计算。”菲尔。翻译过来的。R.Soc.A 373.2046(2015年):20140218。
克雷恩、贝丝和斯蒂芬·舍拉特。“rUNSWift 2D模拟器;行为模拟与rUNSWift体系结构集成。”新南威尔士大学计算机科学与工程学院(2013年)。
米勒,克雷斯顿·艾伦。“时态事件数据流中的结构化模型发现。”蔑视。弗吉尼亚理工学院和州立大学,2013年。
普马尔·加西亚,塞萨尔。“Simulación de Evolución dirigida de bliófagos en poblcions de blacias en 2D.”(2013年)。
西莫斯,曼纽尔,卡洛琳·GL·曹。莱昂纳多:机器人手术中端口放置的交互式决策辅助的第一步。系统、人和控制论(SMC),2013年IEEE国际会议。IEEE,2013。
戈尼-莫雷诺、安吉尔和马丁·阿莫斯。“细菌结合动力学的离散模型。”Arxiv预印本arxiv:1211.1146(2012年)。
马修斯,伊丽莎白A。《ATLAS纪事》:一个以故事为导向的系统,用于创建故事驱动的地图。蔑视。克莱姆森大学,2012年。
马修斯、伊丽莎白和布莱恩·马洛伊。“故事驱动地图的程序化生成。”电脑游戏(CGAMES),2011年第16届国际会议。IEEE,2011。
米勒、克雷斯顿和弗朗西斯·奎克。“走向多模式情境分析。”第13届国际多式联运接口会议记录。ACM,2011年。
韦尔迪,扬尼克。“桌面设备的表面手势和物体跟踪。”蔑视。弗吉尼亚理工学院和州立大学,2010年。
阿格拉瓦尔、维韦克和瑞安·科温。“紧急情况下人群中的动态机器人路径规划”
列表最后更新于2025年1月26日。如果有什么遗漏或问题,请联系我!
引用Pymunk¶
如果你在一部已发表的作品中使用了Pymunk,并想要引用它,下面是一个citation.cff的例子。如果您愿意,您还可以访问Pymunk的Github存储库,并使用缩写“引用此存储库”功能:https://github.com/viblo/pymunk
您可以随意修改以适合您的风格。(如果包含,请务必修改版本号。):
cff-version: 1.2.0
message: "If you use this software and want to cite it, please do so as below."
authors:
- family-names: "Blomqvist"
given-names: "Victor"
title: "Pymunk"
abstract: "A easy-to-use pythonic rigid body 2d physics library"
version: 7.0.0
date-released: 2025-05-28
url: "https://pymunk.org"