摘要: 算法思想 VIPs法利用点的局部偏差来衡量各个数据点的重要性,然后保留预定数目的“重要”点或满足指定重要性水平(阀值)的点,之后D三角化之。 最大Z容差法则是将重要点的选取作为一个优化问题来处理,就是利用格网点原始高程和包含该点的三角形估算的高程差来动态选取重...
算法思想
VIPs法利用点的局部偏差来衡量各个数据点的重要性,然后保留预定数目的“重要”点或满足指定重要性水平(阀值)的点,之后D三角化之。
最大Z容差法则是将重要点的选取作为一个优化问题来处理,就是利用格网点原始高程和包含该点的三角形估算的高程差来动态选取重要点。
两种实现方法
启发丢弃算法与逐步精细算法
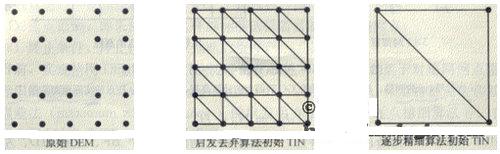
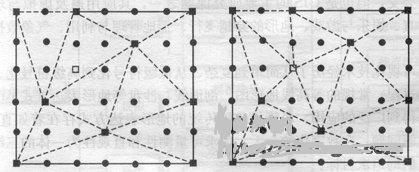
逐步精细算法
算法步骤
S1、连接格网DEM边界四个角点中任意对角的两个点,形成初始三角网。
S2、对每个格网点,找到包含它的三角形,内插该点在所在三角形面上的高程,求出内插高程与该点原始高程之差的绝对值(称为误差)。
S3、如果所有的格网点的误差都在最大容许的范围内则处理结束,输出TIN网;反之则进行下一步。
S4、将具有最大误差的格网点插入已存在的TIN中构成新的TIN,并返回S2。
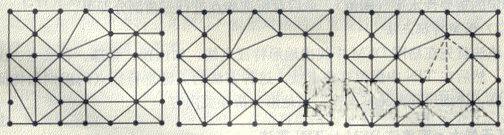
启发丢弃算法
算法步骤
S1、连接对角线形成初始三角网;对TIN中的每个点P做如下工作:对暂时移去P后形成的多边形D三角化;找到P所在三角形后内插P点高程与高程值求差值e(P)并记录;恢复P到TIN中。
S2、找到记录的最小e(P),如果最小e(P)大于给定的阀值,则TIN中全是重要点,算法结束,输出TIN;反之进入下一步。
S3、从TIN删除P,对因此形成的多边形D三角化,形成新TIN。
S4、在新TIN中重新计算原P的各邻接点的e值,返回步骤S2。