摘要: 二值化 由于扫描后的图像是以不同灰度级存储的,为了进行栅格数据矢量化的转换,需压缩为两级(0和1),称为二值化。 二值图像的预处理 对于扫描输入的图幅,由于原稿不干净等原因,总是会出现一些飞白、污点、线划边缘凹凸不平等。 细化 所谓细化就是将二值图像象元...
二值化
由于扫描后的图像是以不同灰度级存储的,为了进行栅格数据矢量化的转换,需压缩为两级(0和1),称为二值化。

二值图像的预处理
对于扫描输入的图幅,由于原稿不干净等原因,总是会出现一些飞白、污点、线划边缘凹凸不平等。
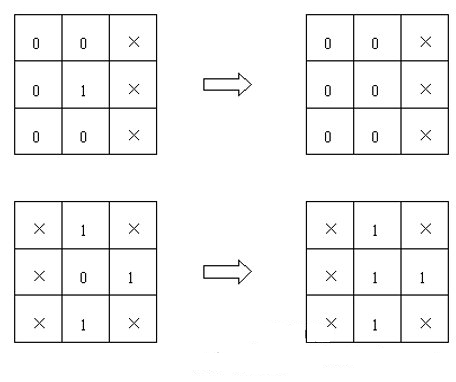
细化
所谓细化就是将二值图像象元阵列逐步剥除轮廓边缘的点,使之成为线划宽度只有一个象元的骨架图形。细化后的图形骨架既保留了原图形的绝大部分特征,又便于下一步的跟踪处理。
细化的基本过程是:
-
1.确定需细化的象元集合;
-
2.移去不是骨架的象元;
-
3.重复,直到仅剩骨架象元。
追踪
细化后的二值图像形成了骨架图,追踪就是把骨架转换为矢量图形的坐标序列。其基本步骤为:
-
1.从左向右,从上向下搜索线划起始点,并记下坐标。
-
2.朝该点的8个方向追踪点,若没有,则本条线的追踪结束,转(1)进行下条线的追踪;否则记下坐标。
-
3.把搜索点移到新取的点上,转(2)
注意的是,已追踪点应作标记,防止重复追踪。
拓扑化
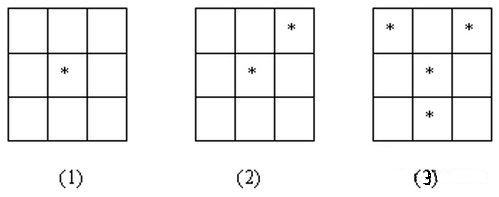
为了进行拓扑化,需找出线的端点和结点,以及孤立点。
-
1.孤立点:8邻城中没有为1的象元。如图(1)。
-
2.端点:8邻城中只有一个为1的象元。如图(2)。
-
3.结点:8邻城中有三个或三个以上为1的象元。